此份笔记是本人学习过程中自己总结记录的,其内容受到课堂教学内容、采用教材、个人认知水平的影响 。虽然笔者力图保证内容准确以及易于理解(起码自己能看懂),但难免存在谬误或者渲染问题。非常欢迎您通过邮件等方式联系我修改,让我们一起让这份笔记变得更好!
第一讲 线性回归
1、基本概念
回归(Regression) 是基于几个给定的特征值,预测与这几个特征相关的未知值。
从数学的角度,回归的目标是学习出一个函数 f ( ⋅ ) f(\cdot) f ( ⋅ ) x \boldsymbol{x} x y y y
线性回归 指限定函数族为线性函数时的回归:
f ( x ) = w 0 + w 1 x 1 + w 2 x 2 + ⋯ + w m x m f(\boldsymbol{x})=w_0+w_1x_1+w_2x_2+\dots+w_mx_m
f ( x ) = w 0 + w 1 x 1 + w 2 x 2 + ⋯ + w m x m
线性回归的目标就是找到一组合适的参数{ w k } k = 1 m \{w_k\}_{k=1}^m { w k } k = 1 m f f f y ^ \hat{y} y ^ y y y
2、单个特征的线性回归
此时输入是一维的,预测函数可以直接写成:
f ( x ) = w 0 + w 1 x f(x)=w_0+w_1x
f ( x ) = w 0 + w 1 x
在几何上,这就是一条直线。这条直线在数据平面上与数据点的分布越贴合,说明拟合效果越好。
假设有n n n ( x ( i ) , y ( i ) ) (x^{(i)}, y^{(i)}) ( x ( i ) , y ( i ) ) 损失函数 :
L ( w 0 , w 1 ) = 1 n ∑ i = 1 n ( f ( x ( i ) ) − y ( i ) ) 2 L(w_0, w_1)=\frac 1 n\sum_{i=1}^n(f(x^{(i)})-y^{(i)})^2
L ( w 0 , w 1 ) = n 1 i = 1 ∑ n ( f ( x ( i ) ) − y ( i ) ) 2
来度量与真实数据的“拟合程度”。则目标就是确定能最小化这个函数值的参数。
考虑w 0 = 0 w_0=0 w 0 = 0
L ( w 1 ) = 1 n ∑ i = 1 n ( w 1 x ( i ) − y ( i ) ) 2 = w 1 2 ∑ i = 1 n ( x ( i ) ) 2 n − 2 w 1 ∑ i = 1 n ( x ( i ) y ( i ) ) n + ∑ i = 1 n ( y ( i ) ) 2 n L(w_1)=\frac 1 n\sum_{i=1}^n(w_1x^{(i)}-y^{(i)})^2=w_1^2\frac{\sum_{i=1}^n (x^{(i)})^2}{n}-2w_1\frac{\sum_{i=1}^n (x^{(i)}y^{(i)})}{n}+\frac{\sum_{i=1}^n (y^{(i)})^2}{n}
L ( w 1 ) = n 1 i = 1 ∑ n ( w 1 x ( i ) − y ( i ) ) 2 = w 1 2 n ∑ i = 1 n ( x ( i ) ) 2 − 2 w 1 n ∑ i = 1 n ( x ( i ) y ( i ) ) + n ∑ i = 1 n ( y ( i ) ) 2
如果将输入写成向量的形式,可以简记为:L ( w 1 ) = w 1 2 x 2 ‾ − 2 w 1 x y ‾ + y 2 ‾ L(w_1)=w_1^2\overline{\boldsymbol{x}^2}-2w_1\overline{\boldsymbol{xy}}+\overline{\boldsymbol{y}^2} L ( w 1 ) = w 1 2 x 2 − 2 w 1 xy + y 2
这个函数是一个凸函数(w 0 ≠ 0 w_0\neq 0 w 0 = 0
∂ L ∂ w 0 = 0 , ∂ L ∂ w 1 = 0 \frac{\partial{L}}{\partial{w_0}}=0, \frac{\partial{L}}{\partial{w_1}}=0
∂ w 0 ∂ L = 0 , ∂ w 1 ∂ L = 0
即可求出最优的参数:
w 0 = x y ‾ ⋅ x ‾ − x 2 ‾ y ‾ x ‾ 2 − x 2 ‾ , w 1 = x ‾ ⋅ y ‾ − x y ‾ x ‾ 2 − x 2 ‾ w_0=\frac{\overline{\boldsymbol{xy}}\cdot\overline{\boldsymbol{x}}-\overline{\boldsymbol{x}^2}\overline{\boldsymbol{y}}}{\overline{\boldsymbol{x}}^2-\overline{\boldsymbol{x}^2}}, w_1=\frac{\overline{\boldsymbol{x}}\cdot\overline{\boldsymbol{y}}-\overline{\boldsymbol{xy}}}{\overline{\boldsymbol{x}}^2-\overline{\boldsymbol{x}^2}}
w 0 = x 2 − x 2 xy ⋅ x − x 2 y , w 1 = x 2 − x 2 x ⋅ y − xy
3、多特征线性回归
输入为x \boldsymbol{x} x
f ( x ) = w 0 + w 1 x 1 + w 2 x 2 + ⋯ + w m x m f(\boldsymbol{x})=w_0+w_1x_1+w_2x_2+\dots+w_mx_m
f ( x ) = w 0 + w 1 x 1 + w 2 x 2 + ⋯ + w m x m
如果将输入写成:x = [ 1 , x 1 , x 2 , … , x m ] \boldsymbol{x}=[1, x_1, x_2, \dots,x_m] x = [ 1 , x 1 , x 2 , … , x m ]
f ( x ) = x w f(\boldsymbol{x})=\boldsymbol{xw}
f ( x ) = xw
其中w = [ w 0 , w 1 , … , w m ] T \boldsymbol{w}=[w_0, w_1, \dots, w_m]^T w = [ w 0 , w 1 , … , w m ] T
损失函数可以写为:
L ( w ) = 1 n ∑ i = 1 n ( x ( i ) w − y ( i ) ) 2 L(\boldsymbol{w})=\frac 1 n \sum_{i=1}^n (\boldsymbol{x}^{(i)}\boldsymbol{w}-y^{(i)})^2
L ( w ) = n 1 i = 1 ∑ n ( x ( i ) w − y ( i ) ) 2
如果将n n n X = [ x ( 1 ) , x ( 2 ) , … , x ( n ) ] T \boldsymbol{X}=[\boldsymbol{x}^{(1)}, \boldsymbol{x}^{(2)}, \dots, \boldsymbol{x}^{(n)}]^T X = [ x ( 1 ) , x ( 2 ) , … , x ( n ) ] T
L ( w ) = 1 n ∥ X w − y ∥ 2 L(\boldsymbol{w})=\frac 1 n \Vert \boldsymbol{Xw}-\boldsymbol{y}\Vert^2
L ( w ) = n 1 ∥ Xw − y ∥ 2
这也是一个凸函数,令其导数为 0:
∂ L ( w ) ∂ w = 2 n X T ( X w − y ) = 0 \frac{\partial L(\boldsymbol{w})}{\partial \boldsymbol{w}}=\frac 2 n \boldsymbol{X}^T(\boldsymbol{Xw}-\boldsymbol{y})=\boldsymbol{0}
∂ w ∂ L ( w ) = n 2 X T ( Xw − y ) = 0
所以可解得:
w ∗ = ( X T X ) − 1 X T y \boldsymbol{w}^*=(\boldsymbol{X}^T\boldsymbol{X})^{-1}\boldsymbol{X}^T\boldsymbol{y}
w ∗ = ( X T X ) − 1 X T y
特征数为 1 时,这个式子就退化到单变量线性回归中推导出来的式子。
偏导数表达式的推导过程:
∂ ∥ X w − y ∥ 2 ∂ w = ∂ ( X w − y ) T ∂ w ∂ ∥ X w − y ∥ 2 ∂ ( X w − y ) = X T ⋅ 2 ( X w − y ) \frac{\partial{\Vert\boldsymbol{Xw}-\boldsymbol{y}\Vert^2}}{\partial{\boldsymbol{w}}}=\frac{\partial{(\boldsymbol{Xw}-\boldsymbol{y})^T}}{\partial{\boldsymbol{w}}}\frac{\partial \Vert\boldsymbol{Xw}-\boldsymbol{y}\Vert^2}{\partial{(\boldsymbol{\boldsymbol{Xw}-\boldsymbol{y}})}}=\boldsymbol{X}^T\cdot 2(\boldsymbol{Xw}-\boldsymbol{y})
∂ w ∂ ∥ Xw − y ∥ 2 = ∂ w ∂ ( Xw − y ) T ∂ ( Xw − y ) ∂ ∥ Xw − y ∥ 2 = X T ⋅ 2 ( Xw − y )
偏导为 0,也即 X T ( X w ∗ − y ) = 0 \boldsymbol{X}^T(\boldsymbol{Xw}^{*}-\boldsymbol{y})=\boldsymbol{0} X T ( Xw ∗ − y ) = 0 y − X w ∗ ⊥ span { x ( 1 ) , x ( 2 ) , … , x ( n ) } \boldsymbol{y}-\boldsymbol{Xw}^{*}\perp \text{span}\{\boldsymbol{x}^{(1)},\boldsymbol{x}^{(2)}, \dots, \boldsymbol{x}^{(n)}\} y − Xw ∗ ⊥ span { x ( 1 ) , x ( 2 ) , … , x ( n ) }
也即最优的 w ∗ \boldsymbol{w}^{*} w ∗ X w ∗ \boldsymbol{Xw}^{*} Xw ∗ y \boldsymbol{y} y x ( 1 ) , x ( 2 ) , … , x ( n ) \boldsymbol{x}^{(1)},\boldsymbol{x}^{(2)}, \dots, \boldsymbol{x}^{(n)} x ( 1 ) , x ( 2 ) , … , x ( n )
4、数值优化
解析解并不总是存在或者方便计算。例如上面的多特征线性规划,其中要对一个矩阵求逆。当这个矩阵较大时,是非常困难的。所以我们通常利用一些数值方法,简化计算。
如梯度下降法 :
w ( t + 1 ) = w ( t ) − r ⋅ ∂ L ( w ) ∂ w ∣ w = w ( t ) \boldsymbol{w}^{(t+1)}=\boldsymbol{w}^{(t)}-r\cdot \frac{\partial L(\boldsymbol{w})}{\partial \boldsymbol{w}}\Bigg|_{\boldsymbol{w}=\boldsymbol{w}^{(t)}}
w ( t + 1 ) = w ( t ) − r ⋅ ∂ w ∂ L ( w ) w = w ( t )
其中r r r
用合适的学习率时,可以逐步收敛到最优解。
一种改进是随机梯度下降法(Stochastic Gradient Descent, SGD)
梯度下降法中,每次更新,都用到了所有的数据点,这对于训练集较大的情况并不友好。为了减少复杂度,我们可以只利用一部分数据点B t \mathcal{B_t} B t
∂ L ( w ) ∂ w ≈ 1 ∣ B t ∣ ∑ i ∈ B t ∂ ( x ( i ) w − y ( i ) ) 2 ∂ w \frac{\partial L(\boldsymbol{w})}{\partial \boldsymbol{w}}\approx\frac{1}{|\mathcal{B_t}|}\sum_{i\in \mathcal{B_t}} \frac{\partial (\boldsymbol{x}^{(i)}\boldsymbol{w}-y^{(i)})^2}{\partial \boldsymbol{w}}
∂ w ∂ L ( w ) ≈ ∣ B t ∣ 1 i ∈ B t ∑ ∂ w ∂ ( x ( i ) w − y ( i ) ) 2
可以证明,这是真实全数据点梯度的无偏估计,也即:
E B t [ 1 ∣ B t ∣ ∑ i ∈ B t ∂ ( x ( i ) w − y ( i ) ) 2 ∂ w ] = ∂ L ( w ) ∂ w \mathbb{E}_{B_t}\left[\frac1{|\mathcal{B}_t|}\sum_{i\in\mathcal{B}_t}\frac{\partial(\boldsymbol{x}^{(i)}\boldsymbol{w}-y^{(i)})^2}{\partial\boldsymbol{w}}\right]=\frac{\partial L(\boldsymbol{w})}{\partial\boldsymbol{w}}
E B t [ ∣ B t ∣ 1 i ∈ B t ∑ ∂ w ∂ ( x ( i ) w − y ( i ) ) 2 ] = ∂ w ∂ L ( w )
第二讲 线性分类器
1、二分类问题
在分类问题时,最后的标签是离散的。特别地,在二分类中,用 0 和 1 两种结果值表示两个类y ∈ { 0 , 1 } y\in\{0, 1\} y ∈ { 0 , 1 }
我们引入 sigmoid 函数(逻辑函数),来将值域变换到[ 0 , 1 ] [0,1] [ 0 , 1 ]
σ ( z ) = 1 1 + e − z \sigma(z)=\frac{1}{1+e^{-z}}
σ ( z ) = 1 + e − z 1
我们将f ( x ) = σ ( x w ) f(\boldsymbol{x})=\sigma(\boldsymbol{xw}) f ( x ) = σ ( xw ) 逻辑回归 。
要实现分类,我们希望真实的标签值为 1 时,预测值尽量接近 1;真实标签为 0 时,预测值尽量接近 0。
采用f ( x ) = σ ( x w ) f(\boldsymbol{x})=\sigma(\boldsymbol{xw}) f ( x ) = σ ( xw )
L ( w ) = { − log ( σ ( x w ) ) , y = 1 − log ( 1 − σ ( x w ) ) , y = 0 L(\boldsymbol w)=
\begin{cases}
-\log(\sigma(\boldsymbol{xw})), &y=1\\
-\log(1-\sigma(\boldsymbol{xw})), &y=0\\
\end{cases}
L ( w ) = { − log ( σ ( xw )) , − log ( 1 − σ ( xw )) , y = 1 y = 0
也可以写成等价形式:
L ( w ) = − y log ( σ ( x w ) ) − ( 1 − y ) log ( 1 − σ ( x w ) ) L(\boldsymbol w)=-y\log(\sigma(\boldsymbol{xw}))
-(1-y)\log(1-\sigma(\boldsymbol{xw}))
L ( w ) = − y log ( σ ( xw )) − ( 1 − y ) log ( 1 − σ ( xw ))
这种形式的损失函数,我们称之为交叉熵
交叉熵函数是凸的,比非凸的平方误差更容易优化。
交叉熵的梯度:
∂ L ( w ) ∂ w = 1 N ∑ i = 1 N [ σ ( x ( i ) w ) − y ( i ) ] x ( i ) T \frac{\partial L(\boldsymbol{w})}{\partial \boldsymbol{w}}=\frac 1 N \sum_{i=1}^N[\sigma(\boldsymbol{x}^{(i)}\boldsymbol{w})-y^{(i)}]\boldsymbol{x}^{ {(i)}T}
∂ w ∂ L ( w ) = N 1 i = 1 ∑ N [ σ ( x ( i ) w ) − y ( i ) ] x ( i ) T
由于其是凸的,令梯度为 0 即可得到最优的w ∗ \boldsymbol{w}^* w ∗
最终,利用最优的w ∗ \boldsymbol{w}^* w ∗ f ( x ) = σ ( x w ) f(\boldsymbol{x})=\sigma(\boldsymbol{xw}) f ( x ) = σ ( xw )
一个完全等价的方法是,将决策边界调整为 0,则此时x w = 0 \boldsymbol{xw}=0 xw = 0 w \boldsymbol{w} w
一般地,对于一个固定的向量w ∈ R k \boldsymbol{w}\in \R^k w ∈ R k x ∈ { x ∣ x w = 0 } \boldsymbol{x}\in\{\boldsymbol{x}|\boldsymbol{xw}=0\} x ∈ { x ∣ xw = 0 } K − 1 K-1 K − 1
所以,本质上逻辑回归+交叉熵还是在空间中画一个超平面将数据点分成两边,无法表达非线性的决策边界。这也是为什么逻辑回归称之为线性分类器 ,这里的线性指决策平面是线性的。
2、多分类问题
对于多分类问题,一种方法是将其视为若干个二分类问题;另一种方法是直接将其分为某一类。
对于第一种方法,假设共有K K K K K K f i ( x ) f_i(\boldsymbol{x}) f i ( x ) x 0 \boldsymbol{x}_0 x 0 k k k
k = arg max i f i ( x ) k=\arg\max_i f_i(\boldsymbol{x})
k = arg i max f i ( x )
对于第二种方法,引入了 softmax 函数:
softmax i ( z ) = e z i ∑ k = 1 K e z k \text{softmax}_i(\boldsymbol{z})=\frac{e^{z_i}}{\sum_{k=1}^K e^{z_k}}
softmax i ( z ) = ∑ k = 1 K e z k e z i
一个显然的性质是∑ i = 1 K softmax i ( z ) = 1 \sum_{i=1}^K \text{softmax}_i(\boldsymbol{z})=1 ∑ i = 1 K softmax i ( z ) = 1
于是样本x \boldsymbol{x} x i i i
f i ( x ) = softmax i ( x W ) = e x w i ∑ k = 1 K e x w k f_i(\boldsymbol{x})=\text{softmax}_i(\boldsymbol{xW})=\frac{e^{\boldsymbol{xw}_i}}{\sum_{k=1}^Ke^{\boldsymbol{xw}_k}}
f i ( x ) = softmax i ( xW ) = ∑ k = 1 K e xw k e xw i
这里W = [ w 1 , w 2 , … , w K ] \boldsymbol{W}=[\boldsymbol{w}_1, \boldsymbol{w}_2, \dots, \boldsymbol{w}_K] W = [ w 1 , w 2 , … , w K ] x \boldsymbol{x} x i i i f i ( x ) f_i(\boldsymbol{x}) f i ( x )
两个类的 softmax 分类,等价于上一节的逻辑回归,只是参数w = w 1 − w 2 \boldsymbol{w}=\boldsymbol{w}_1-\boldsymbol{w}_2 w = w 1 − w 2
将真实标签y y y y \boldsymbol{y} y
L ( w 1 , w 2 , ⋯ , w K ) = − 1 N ∑ l = 1 N ∑ k = 1 K y k ( l ) log [ softmax k ( x ( l ) W ) ] L(\boldsymbol{w}_1,\boldsymbol{w}_2,\cdots,\boldsymbol{w}_K)=-\frac1N\sum_{l=1}^N\sum_{k=1}^Ky_k^{(l)}\log[\text{softmax}_k(\boldsymbol{x}^{(l)}\boldsymbol{W})]
L ( w 1 , w 2 , ⋯ , w K ) = − N 1 l = 1 ∑ N k = 1 ∑ K y k ( l ) log [ softmax k ( x ( l ) W )]
其中y k ( l ) y_k^{(l)} y k ( l ) y ( l ) \boldsymbol{y}^{(l)} y ( l ) k k k
关于w j \boldsymbol{w}_j w j
∂ L ( W ) ∂ w j = 1 N ∑ l = 1 N ( softmax j ( x ( l ) W ) − y j ( l ) ) x ( l ) T \frac{\partial L(\boldsymbol{W})}{\partial\boldsymbol{w}_j}=\frac1N\sum_{l=1}^N\big(\text{softmax}_j\big(\boldsymbol{x}^{(l)}\boldsymbol{W}\big)-\boldsymbol{y}_j^{(l)}\big)\boldsymbol{x}^{(l)T}
∂ w j ∂ L ( W ) = N 1 l = 1 ∑ N ( softmax j ( x ( l ) W ) − y j ( l ) ) x ( l ) T
若简记W = [ w 1 , w 2 , … , w k ] \boldsymbol{W}=[\boldsymbol{w}_1, \boldsymbol{w}_2, \dots, \boldsymbol{w}_k] W = [ w 1 , w 2 , … , w k ]
∂ L ( W ) ∂ W = 1 N ∑ l = 1 N x ( l ) T ( softmax ( x ( l ) W ) − y ( l ) ) \frac{\partial L(\boldsymbol{W})}{\partial\boldsymbol{W}}=\frac1N\sum_{l=1}^N\boldsymbol{x}^{(l)T}\big(\text{softmax}\big(\boldsymbol{x}^{(l)}\boldsymbol{W}\big)-\boldsymbol{y}^{(l)}\big)
∂ W ∂ L ( W ) = N 1 l = 1 ∑ N x ( l ) T ( softmax ( x ( l ) W ) − y ( l ) )
利用梯度下降进行对参数进行更新。
第三讲 从概率的角度看回归与分类
回归和分类的目标都是根据输入x \boldsymbol{x} x y y y y ^ \hat y y ^ x \boldsymbol{x} x y y y
y ^ = ∫ y p ( y ∣ x ) d y \hat y=\int y p(y|\boldsymbol{x})dy
y ^ = ∫ y p ( y ∣ x ) d y
或者概率最大的那个值作为预测值
y ^ = arg max y p ( y ∣ x ) \hat y =\arg \max_y p(y|\boldsymbol{x})
y ^ = arg y max p ( y ∣ x )
1、从概率的角度看回归
单变量的高斯分布:
p ( z ) − 1 2 π σ 2 exp [ − ( z − μ ) 2 2 σ 2 ] p(z)-\frac{1}{\sqrt{2\pi \sigma^2}}\exp[-\frac{(z-\mu)^2}{2\sigma^2}]
p ( z ) − 2 π σ 2 1 exp [ − 2 σ 2 ( z − μ ) 2 ]
其中μ \mu μ σ 2 = E [ ( z − μ ) 2 ] \sigma^2=E[(z-\mu)^2] σ 2 = E [( z − μ ) 2 ]
多变量的高斯分布:
p ( z ) = 1 ( 2 π ) D / 2 ∣ Σ ∣ 1 / 2 exp { − 1 2 ( z − μ ) T Σ − 1 ( z − μ ) } p(\boldsymbol{z})=\frac{1}{(2\pi)^{D/2}|\boldsymbol{\Sigma}|^{1/2}}\exp\left\{-\frac{1}{2}(\boldsymbol{z}-\boldsymbol{\mu})^{T}\boldsymbol{\Sigma}^{-1}(\boldsymbol{z}-\boldsymbol{\mu})\right\}
p ( z ) = ( 2 π ) D /2 ∣ Σ ∣ 1/2 1 exp { − 2 1 ( z − μ ) T Σ − 1 ( z − μ ) }
其中D D D μ ∈ R D \boldsymbol{\mu}\in \R^D μ ∈ R D Σ ∈ R D × D \boldsymbol{\Sigma}\in \R^{D\times D} Σ ∈ R D × D
根据协方差矩阵,分布的形状不尽相同:
每一个协方差矩阵Σ \boldsymbol{\Sigma} Σ Σ = U Λ U T \boldsymbol{\Sigma}=\boldsymbol{U \Lambda U}^T Σ = U Λ U T U \boldsymbol{U} U U U T = I \boldsymbol{UU}^T=\boldsymbol{I} UU T = I Λ \boldsymbol{\Lambda} Λ
于是,记z ′ = U T z , μ ′ = U T μ \boldsymbol{z}'=\boldsymbol{U}^T\boldsymbol{z}, \boldsymbol{\mu}'=\boldsymbol{U}^T\boldsymbol{\mu} z ′ = U T z , μ ′ = U T μ
p ( z ′ ) = 1 ( 2 π ) D / 2 ∣ Λ ∣ 1 / 2 exp { − 1 2 ( z ′ − μ ′ ) T Λ − 1 ( z ′ − μ ′ ) } p(\boldsymbol{z}')=\frac{1}{(2\pi)^{D/2}|\boldsymbol{\Lambda}|^{1/2}}\exp\left\{-\frac{1}{2}(\boldsymbol{z}'-\boldsymbol{\mu}')^{T}\boldsymbol{\Lambda}^{-1}(\boldsymbol{z}'-\boldsymbol{\mu}')\right\}
p ( z ′ ) = ( 2 π ) D /2 ∣ Λ ∣ 1/2 1 exp { − 2 1 ( z ′ − μ ′ ) T Λ − 1 ( z ′ − μ ′ ) }
调整前后的对比:
对于回归问题,我们假设y y y y y y
p ( y ∣ x ; w ) ∼ N ( y ; x w , σ 2 ) p(y|\boldsymbol{x};\boldsymbol{w})\sim \mathcal{N}(y;\boldsymbol{xw}, \sigma^2)
p ( y ∣ x ; w ) ∼ N ( y ; xw , σ 2 )
取其均值作为预测值:
y ^ = x w \hat y=\boldsymbol{xw}
y ^ = xw
我们的目标是最大化对数似然概率:
max w log p ( y ∣ x ; w ) \max_{\boldsymbol{w}} \log p(y|\boldsymbol{x};\boldsymbol{w})
w max log p ( y ∣ x ; w )
这等价于:
min w ( y − x w ) 2 \min_{\boldsymbol{w}}(y-\boldsymbol{xw})^2
w min ( y − xw ) 2
与之前是一致的。
对于N N N
p ( y ( 1 ) , ⋯ , y ( N ) ∣ x ( 1 ) , ⋯ , x ( N ) ) = ∏ i = 1 N 1 2 π σ 2 exp [ − 1 2 ( y ( i ) − x ( i ) w ) 2 σ 2 ] p\big(y^{(1)},\cdots,y^{(N)}|\boldsymbol{x}^{(1)},\cdots,\boldsymbol{x}^{(N)}\big)=\prod_{i=1}^{N}\frac{1}{\sqrt{2\pi\sigma^{2}}}\exp\left[-\frac{1}{2}\frac{\big(y^{(i)}-\boldsymbol{x}^{(i)}w\big)^{2}}{\sigma^{2}}\right]
p ( y ( 1 ) , ⋯ , y ( N ) ∣ x ( 1 ) , ⋯ , x ( N ) ) = i = 1 ∏ N 2 π σ 2 1 exp [ − 2 1 σ 2 ( y ( i ) − x ( i ) w ) 2 ]
最大化其对数似然概率等价于最小化:
∑ i = 1 N ( y ( i ) − x ( i ) w ) 2 \sum_{i=1}^N(y^{(i)}-\boldsymbol{x}^{(i)}\boldsymbol{w})^2
i = 1 ∑ N ( y ( i ) − x ( i ) w ) 2
仍然与之前一致。
2、从概率的角度看分类
考虑伯努利分布:
p ( z ) = { π , z = 1 1 − π , z = 0 p(z)=
\begin{cases}
&\pi, &z=1\\
&1-\pi, &z=0
\end{cases}
p ( z ) = { π , 1 − π , z = 1 z = 0
其概率密度函数可以写为p ( z ) = π z ( 1 − π ) 1 − z , z = 0 , 1 p(z)=\pi^z(1-\pi)^{1-z}, z=0, 1 p ( z ) = π z ( 1 − π ) 1 − z , z = 0 , 1
对于二分类问题,假设其服从伯努利分布,则有:
p ( y ∣ x ) = ( σ ( x w ) ) y ( 1 − σ ( x w ) ) 1 − y p(y|\boldsymbol{x})=(\sigma(\boldsymbol{xw}))^y(1-\sigma(\boldsymbol{xw}))^{1-y}
p ( y ∣ x ) = ( σ ( xw ) ) y ( 1 − σ ( xw ) ) 1 − y
其中π = σ ( x w ) , y = 0 , 1 \pi=\sigma(\boldsymbol{xw}), y=0, 1 π = σ ( xw ) , y = 0 , 1
目标仍然是最大化似然概率max log p ( y ∣ x ) \max \log p(y|\boldsymbol{x}) max log p ( y ∣ x )
对于多分类问题,同理。分布写为:
p ( z ) = ∏ k = 1 K π k z k p(\boldsymbol{z})=\prod_{k=1}^K \pi_k^{z_k}
p ( z ) = k = 1 ∏ K π k z k
其中z \boldsymbol{z} z π k \pi_k π k k k k
令π k = softmax k ( x W ) \pi_k=\text{softmax}_k(\boldsymbol{xW}) π k = softmax k ( xW )
p ( y ∣ x ) = ∏ k = 1 K [ softmax k ( x W ) ] y k p(\boldsymbol{y}|\boldsymbol{x})=\prod_{k=1}^{K}[\text{softmax}_k(\boldsymbol{xW})]^{y_k}
p ( y ∣ x ) = k = 1 ∏ K [ softmax k ( xW ) ] y k
最大化对数似然概率仍然等价于最小化交叉熵。
第四讲 非线性模型、过拟合与正则化
1、非线性模型
线性回归只对原本就是线性关系的变量效果较好;线性分类器的决策边界也只能是线性的。事实上,现实中线性的决策边界或者线性回归无法处理更复杂的情况。
一个基本的想法就是用基函数去非线性化原来的线性模型。
原来的线性回归可写为f ( x ) = w 0 + w 1 x = [ 1 , x ] w f(x)=w_0+w_1x=[1, x]\boldsymbol{w} f ( x ) = w 0 + w 1 x = [ 1 , x ] w f ( x ) = w 0 + w 1 x + w 2 x 2 + w 3 x 3 = ϕ ( x ) w f(x)=w_0+w_1x+w_2x^2+w_3x^3=\boldsymbol{\phi}(x)\boldsymbol{w} f ( x ) = w 0 + w 1 x + w 2 x 2 + w 3 x 3 = ϕ ( x ) w
一般地,基函数模型可以写为:f ( x ) = ϕ ( x ) w = [ ϕ 1 ( x ) , ϕ 2 ( x ) , ⋯ , ϕ n ( x ) ] w f(\boldsymbol{x})=\boldsymbol{\phi}(\boldsymbol{x})\boldsymbol{w}=[\phi_1(\boldsymbol{x}), \phi_2(\boldsymbol{x}), \dotsm ,\phi_n(\boldsymbol{x})]\boldsymbol{w} f ( x ) = ϕ ( x ) w = [ ϕ 1 ( x ) , ϕ 2 ( x ) , ⋯ , ϕ n ( x )] w
基函数模型对x \boldsymbol{x} x w \boldsymbol{w} w
经过非线性变换后,损失函数可以写为:
L ( w ) = 1 N ∥ ϕ ( X ) w − y ∥ 2 L(\boldsymbol{w})=\frac 1 N \Vert \boldsymbol{\phi}(\boldsymbol{X})\boldsymbol{w}-\boldsymbol{y}\Vert^2
L ( w ) = N 1 ∥ ϕ ( X ) w − y ∥ 2
其中
ϕ ( X ) = [ ϕ ( x ( 1 ) ) ⋮ ϕ ( x ( N ) ) ] \boldsymbol{\phi}(\boldsymbol{X})=
\begin{bmatrix}
\boldsymbol{\phi}(\boldsymbol{x}^{(1)})\\
\vdots\\
\boldsymbol{\phi}(\boldsymbol{x}^{(N)})
\end{bmatrix}
ϕ ( X ) = ϕ ( x ( 1 ) ) ⋮ ϕ ( x ( N ) )
最小化损失函数,最优参数为:
w ∗ = ( ϕ T ϕ ) − 1 ϕ T y \boldsymbol{w}^*=(\boldsymbol{\phi}^T\boldsymbol{\phi})^{-1}\boldsymbol{\phi}^T\boldsymbol{y}
w ∗ = ( ϕ T ϕ ) − 1 ϕ T y
这就是将原来线性回归中的X \boldsymbol{X} X ϕ = ϕ ( X ) \boldsymbol{\phi}=\boldsymbol{\phi}\boldsymbol{(X)} ϕ = ϕ ( X )
分类问题中同理。交叉熵变为:
L ( W ) = − 1 N ∑ l = 1 N ∑ k = 1 K y k ( l ) log [ softmax k ( ϕ ( x ( l ) ) W ) ] L(\boldsymbol{W})=-\frac1N\sum_{l=1}^N\sum_{k=1}^Ky_k^{(l)}\log[\text{softmax}_k(\boldsymbol{\phi}(\boldsymbol{x}^{(l)})\boldsymbol{W})]
L ( W ) = − N 1 l = 1 ∑ N k = 1 ∑ K y k ( l ) log [ softmax k ( ϕ ( x ( l ) ) W )]
梯度变为:
∂ L ( W ) ∂ w j = 1 N ∑ l = 1 N ( softmax j ( ϕ ( l ) W ) − y ( l ) ) ϕ ( l ) T \frac{\partial L(\boldsymbol{W})}{\partial\boldsymbol{w}_j}=\frac1N\sum_{l=1}^N\big(\text{softmax}_j\big(\boldsymbol{\phi}^{(l)}\boldsymbol{W}\big)-\boldsymbol{y}^{(l)}\big)\boldsymbol{\phi}^{(l)T}
∂ w j ∂ L ( W ) = N 1 l = 1 ∑ N ( softmax j ( ϕ ( l ) W ) − y ( l ) ) ϕ ( l ) T
同样是将原来的x ( l ) \boldsymbol{x}^{(l)} x ( l ) ϕ ( l ) = ϕ ( x ( l ) ) \boldsymbol{\phi}^{(l)}=\boldsymbol{\phi}(\boldsymbol{x}^{(l)}) ϕ ( l ) = ϕ ( x ( l ) )
2、过拟合
基函数的维数越高,就能更好的拟合训练数据。但是相对的,在测试集上的表现就会越来越差。
模型在模式数据上的表现称为这个模型的泛化能力 。一般来说,基函数的维数越多,这个模型的参数也就越多,模型越复杂。
不能仅仅依据模型在测试集上的表现来评价一个模型,其在泛化能力也十分重要。
可以将 20%~30%的训练集数据划分出来作为验证集 。利用训练集的数据进行训练,然后再验证集上评估模型的泛化能力。选择在验证集上表现最好的模型。
当验证集上的错误率随着复杂度提升而下降时,称模型此时是欠拟合 的;当验证集上的错误率随复杂度提升而提升时,称模型此时是过拟合 的。
训练数据通常是比较少的,如果还划分一部分用于验证集,则没有足够的数据样本用于训练,此时可以采取K-fold 交叉验证 。
也即把训练集分为 K 份,第 i 轮训练用第 i 份作为验证集,其他 K-1 份用于训练。
信息准则(Information Criteria) 用于评估模型的复杂度。
Akaike Information Criteria(AIC,赤池信息准则):
AIC = 2 M − 2 log ( L ) \text{AIC}=2M-2\log(L)
AIC = 2 M − 2 log ( L )
其中M M M L L L
Bayesian Information Criteria(BIC)
BIC = M log N − 2 log ( L ) \text{BIC}=M\log N-2\log (L)
BIC = M log N − 2 log ( L )
其中N N N
这两个标准一般只能用于概率模型中,因为需要用到对数似然。
3、正则化
过拟合一般是由高阶项对应的参数过大导致的。我们引入正则项来平衡这些影响:
L ~ ( w ) = L ( w ) + λ ∥ w ∥ 2 2 \tilde{L}(\boldsymbol{w})=L(\boldsymbol{w})+\lambda \Vert \boldsymbol{w}\Vert_2^2
L ~ ( w ) = L ( w ) + λ ∥ w ∥ 2 2
其中λ \lambda λ L 2 L_2 L 2
正则化后得到的模型曲线更平滑。
还有一种L 1 L_1 L 1
L ~ ( w ) = L ( w ) + λ ∥ w ∥ 1 \tilde{L}(\boldsymbol{w})=L(\boldsymbol{w})+\lambda \Vert \boldsymbol{w}\Vert_1
L ~ ( w ) = L ( w ) + λ ∥ w ∥ 1
这种正则化可以让参数变为 0(而不仅仅是趋向 0),所以经常趋向于得到松弛解。
第五讲 支持向量机
1、线性分类器的决策边界
之前的线性分类器的基础上加上一个偏置项,交叉熵损失函数变为:
L ( w , b ) = − y log ( σ ( w T x + b ) ) − ( 1 − y ) log ( 1 − σ ( w T x + b ) ) L(\boldsymbol{w}, b)=-y\log(\sigma(\boldsymbol{w}^T\boldsymbol{x}+b))
-(1-y)\log(1-\sigma(\boldsymbol{w}^T\boldsymbol{x}+b))
L ( w , b ) = − y log ( σ ( w T x + b )) − ( 1 − y ) log ( 1 − σ ( w T x + b ))
损失函数最小值为 0,记使其为 0 的最优的w ∗ , b ∗ \boldsymbol{w}^*, b^* w ∗ , b ∗ L ( w , b ) = 0 L(\boldsymbol{w}, b)=0 L ( w , b ) = 0 { w ∣ w ∗ T x + b ∗ = 0 } \{\boldsymbol{w}|\boldsymbol{w}^{*T}\boldsymbol{x}+b^*=0\} { w ∣ w ∗ T x + b ∗ = 0 }
这个超平面:
垂直于w ∗ \boldsymbol{w}^* w ∗
到原点的距离是− b ∗ / ∥ w ∗ ∥ -b^*/\Vert \boldsymbol{w}^* \Vert − b ∗ /∥ w ∗ ∥
事实上,使得L ( w , b ) = 0 L(\boldsymbol{w}, b)=0 L ( w , b ) = 0 w ∗ , b ∗ \boldsymbol{w}^*, b^* w ∗ , b ∗
2、线性最大间隔分类器
如何表示“间隔”呢?考虑某个数据点x \boldsymbol{x} x H \mathcal{H} H
h ( x ) = w T x + b h(\boldsymbol{x})=\boldsymbol{w}^T\boldsymbol{x}+b h ( x ) = w T x + b
从原点到某个数据点x \boldsymbol{x} x x \boldsymbol{x} x x = m 1 + m 2 \boldsymbol{x}=\boldsymbol{m}_1+\boldsymbol{m}_2 x = m 1 + m 2 m 2 ⊥ H \boldsymbol{m}_2\perp \mathcal{H} m 2 ⊥ H m 1 \boldsymbol{m}_1 m 1 H \mathcal{H} H h ( m 1 ) = 0 h(\boldsymbol{m}_1)=0 h ( m 1 ) = 0
则:
h ( x ) = w T ( m 1 + m 2 ) + b = w T m 2 h(\boldsymbol{x})=\boldsymbol{w}^T(\boldsymbol{m_1}+\boldsymbol{m}_2)+b=\boldsymbol{w}^T \boldsymbol{m}_2
h ( x ) = w T ( m 1 + m 2 ) + b = w T m 2
又因为m 2 ∥ w \boldsymbol{m_2} \parallel \boldsymbol{w} m 2 ∥ w
m 2 = ∥ m 2 ∥ w ∥ w ∥ \boldsymbol{m}_2=\Vert \boldsymbol{m}_2\Vert \frac{\boldsymbol{w}}{\Vert \boldsymbol{w}\Vert}
m 2 = ∥ m 2 ∥ ∥ w ∥ w
结合上面两式即得:
∥ m 2 ∥ = h ( x ) ∥ w ∥ \Vert \boldsymbol{m}_2\Vert=\frac{h(\boldsymbol{x})}{\Vert \boldsymbol{w}\Vert}
∥ m 2 ∥ = ∥ w ∥ h ( x )
所以对于正类的数据点x \boldsymbol{x} x h ( x ) / ∥ w ∥ h(\boldsymbol{x})/\Vert \boldsymbol{w}\Vert h ( x ) /∥ w ∥ x \boldsymbol{x} x − h ( x ) / ∥ w ∥ -h(\boldsymbol{x})/\Vert \boldsymbol{w}\Vert − h ( x ) /∥ w ∥
y h ( x ) ∥ w ∥ , y ∈ { − 1 , 1 } \frac{y h(\boldsymbol{x})}{\Vert \boldsymbol{w}\Vert}, y\in \{-1, 1\}
∥ w ∥ y h ( x ) , y ∈ { − 1 , 1 }
“间隔”取决于距离超平面最近的那个数据点:
Margin = min l y ( l ) ( w T x ( l ) + b ) ∥ w ∥ \text{Margin}=\min_l \frac{y^{(l)}(\boldsymbol{w}^T\boldsymbol{x}^{(l)}+b)}{\Vert \boldsymbol{w}\Vert}
Margin = l min ∥ w ∥ y ( l ) ( w T x ( l ) + b )
我们希望找到一个超平面使得间隔最大,也即希望求得:
arg max w , b { min l y ( l ) ( w T x ( l ) + b ) ∥ w ∥ } \arg \max_{\boldsymbol{w}, b} \left\{\min_l \frac{y^{(l)}(\boldsymbol{w}^T\boldsymbol{x}^{(l)}+b)}{\Vert \boldsymbol{w}\Vert}\right\}
arg w , b max { l min ∥ w ∥ y ( l ) ( w T x ( l ) + b ) }
原问题是一个无约束的优化问题。假设w ∗ \boldsymbol{w}^* w ∗ b b b w ~ = κ w ∗ , b ~ = κ b \widetilde{\boldsymbol{w} }=\kappa\boldsymbol{w}^*, \widetilde{b}=\kappa b w = κ w ∗ , b = κb κ ≠ 0 \kappa\neq 0 κ = 0
一定存在κ \kappa κ y ( l ) ( κ w ∗ T x ( l ) + κ b ∗ ) ⩾ 1 , ∀ l y^{(l)}(\kappa\boldsymbol{w}^{*T}\boldsymbol{x}^{(l)}+\kappa b^*)\geqslant 1, \forall l y ( l ) ( κ w ∗ T x ( l ) + κ b ∗ ) ⩾ 1 , ∀ l l l l
所以原问题可以转化为一个等价的有约束问题,即求:
arg max w ~ , b ~ { min l y ( l ) ( w ~ T x ( l ) + b ~ ) ∥ w ~ ∥ } , s . t . y ( l ) ( w ~ T x ( l ) + b ~ ) ⩾ 1 , ∀ l \arg \max_{\widetilde{\boldsymbol{w} }, \widetilde{b}} \left\{\min_l \frac{y^{(l)}(\widetilde{\boldsymbol{w} }^T\boldsymbol{x}^{(l)}+\widetilde{b})}{\Vert \widetilde{\boldsymbol{w} }\Vert}\right\}, s.t.\ y^{(l)}(\widetilde{\boldsymbol{w} }^T\boldsymbol{x}^{(l)}+\widetilde{b})\geqslant 1, \forall l
arg w , b max { l min ∥ w ∥ y ( l ) ( w T x ( l ) + b ) } , s . t . y ( l ) ( w T x ( l ) + b ) ⩾ 1 , ∀ l
对于这个问题,因为存在某个l l l
min l y ( l ) ( w ~ T x ( l ) + b ~ ) = 1 \min_l y^{(l)}(\widetilde{\boldsymbol{w} }^T\boldsymbol{x}^{(l)}+\widetilde{b})=1
l min y ( l ) ( w T x ( l ) + b ) = 1
优化目标变为:
arg max w ~ , b ~ 1 ∥ w ~ ∥ \arg \max_{\widetilde{\boldsymbol{w} }, \widetilde{b}} \frac{1}{\Vert \widetilde{\boldsymbol{w} }\Vert}
arg w , b max ∥ w ∥ 1
这等价于:
arg min w ~ , b ~ 1 2 ∥ w ~ ∥ 2 \arg \min_{\widetilde{\boldsymbol{w} }, \widetilde{b}} \frac{1}{2}\Vert \widetilde{\boldsymbol{w} }\Vert^2
arg w , b min 2 1 ∥ w ∥ 2
综上,求最大间隔的超平面等价于求解以下有约束的凸优化问题:
arg min w ~ , b ~ 1 2 ∥ w ~ ∥ 2 , s . t . y ( l ) ( w ~ T x ( l ) + b ~ ) ⩾ 1 , ∀ l \arg \min_{\widetilde{\boldsymbol{w} }, \widetilde{b}} \frac{1}{2}\Vert \widetilde{\boldsymbol{w} }\Vert^2, s.t.\ y^{(l)}(\widetilde{\boldsymbol{w} }^T\boldsymbol{x}^{(l)}+\widetilde{b})\geqslant 1, \forall l
arg w , b min 2 1 ∥ w ∥ 2 , s . t . y ( l ) ( w T x ( l ) + b ) ⩾ 1 , ∀ l
如果求得最优参数w ∗ , b ∗ \boldsymbol{w}^*, b^* w ∗ , b ∗
y ^ = sign ( w ∗ T x + b ∗ ) \hat y=\text{sign}(\boldsymbol{w}^{*T}\boldsymbol{x}+b^*)
y ^ = sign ( w ∗ T x + b ∗ )
经过转化后的这个凸优化问题可以利用拉格朗日乘子法求解,具体过程在人工智能笔记中有详细介绍。
简而言之,引入拉格朗日乘子α \boldsymbol{\alpha} α α ∗ \boldsymbol{\alpha}^* α ∗ w ∗ , b ∗ \boldsymbol{w}^*, b^* w ∗ , b ∗
分类器也可以等价地写为:
y ^ = sign ( ∑ l = 1 N α ( l ) y ( l ) x ( l ) T x + b ∗ ) \hat y=\text{sign}\left(\sum_{l=1}^N\alpha^{(l)}y^{(l)}\boldsymbol{x}^{(l)T}\boldsymbol{x}+b^*\right)
y ^ = sign ( l = 1 ∑ N α ( l ) y ( l ) x ( l ) T x + b ∗ )
可以证明,α ( i ) \alpha^{(i)} α ( i ) α ( i ) \alpha^{(i)} α ( i ) x ( i ) \boldsymbol{x}^{(i)} x ( i ) 支持向量 。也即下图中,恰好在间隔边界上的数据点。
3、软线性最大间隔分类器
线性最大间隔分类器有解的前提是数据是线性可分的。如果数据不是线性可分的,就需要引入软间隔 。
也即约束变为:
y ( l ) ( w T x ( l ) + b ) ⩾ 1 − ξ ( l ) y^{(l)}(\boldsymbol{w}^T\boldsymbol{x}^{(l)}+b)\geqslant 1-\xi^{(l)}
y ( l ) ( w T x ( l ) + b ) ⩾ 1 − ξ ( l )
其中ξ ( l ) ⩾ 0 \xi^{(l)}\geqslant 0 ξ ( l ) ⩾ 0
min w , b , ξ ( 1 2 ∥ w ∥ 2 + C ∑ l = 1 N ξ ( l ) ) \min_{\boldsymbol{w}, b, \boldsymbol{\xi}} \left(\frac{1}{2}\Vert \boldsymbol{w}\Vert^2+C\sum_{l=1}^N\xi^{(l)}\right)
w , b , ξ min ( 2 1 ∥ w ∥ 2 + C l = 1 ∑ N ξ ( l ) )
其中C C C 惩罚因子 ,它表示了误差的权重。C C C
同样可以利用拉格朗日乘子法求解。最终的分类器的形式仍然是:
y ^ = sign ( ∑ l = 1 N α ( l ) y ( l ) x ( l ) T x + b ∗ ) \hat y=\text{sign}\left(\sum_{l=1}^N\alpha^{(l)}y^{(l)}\boldsymbol{x}^{(l)T}\boldsymbol{x}+b^*\right)
y ^ = sign ( l = 1 ∑ N α ( l ) y ( l ) x ( l ) T x + b ∗ )
4、核技巧
上述的分类器仍然是线性的,引入基函数后,可以得到非线性的分类器:
y ^ = sign ( ∑ l = 1 N α ( l ) y ( l ) ϕ ( x ( l ) ) T ϕ ( x ) + b ∗ ) \hat y=\text{sign}\left(\sum_{l=1}^N\alpha^{(l)}y^{(l)}\boldsymbol{\phi}(\boldsymbol{x}^{(l)})^T\boldsymbol{\phi}(\boldsymbol{x})+b^*\right)
y ^ = sign ( l = 1 ∑ N α ( l ) y ( l ) ϕ ( x ( l ) ) T ϕ ( x ) + b ∗ )
越高维的空间中,数据点之间的距离越大,也就越容易找到一个可行的“超平面”,所以我们希望变换后的特征空间 ϕ ( x ) \boldsymbol{\phi}(\boldsymbol{x}) ϕ ( x )
整个问题的难点在于计算ϕ ( x ( l ) ) T ϕ ( x ) \boldsymbol{\phi}(\boldsymbol{x}^{(l)})^T\boldsymbol{\phi}(\boldsymbol{x}) ϕ ( x ( l ) ) T ϕ ( x )
核函数 是一个包含两个变量的函数K ( x , x ′ ) K(\boldsymbol{x}, \boldsymbol{x}') K ( x , x ′ )
K ( x , x ′ ) = ϕ ( x ) T ϕ ( x ′ ) K(\boldsymbol{x}, \boldsymbol{x}')=\boldsymbol{\phi}(\boldsymbol{x})^T\boldsymbol{\phi}(\boldsymbol{x}')
K ( x , x ′ ) = ϕ ( x ) T ϕ ( x ′ )
Mercer 定理 指出,如果一个函数K ( x , x ′ ) K(\boldsymbol{x}, \boldsymbol{x}') K ( x , x ′ )
∫ ∫ K ( x , x ′ ) f ( x ) f ( x ′ ) d x d x ′ ⩾ 0 , ∀ f ( ⋅ ) ∈ L 2 \int \int K(\boldsymbol{x}, \boldsymbol{x}')f(\boldsymbol{x})f(\boldsymbol{x}')d\boldsymbol{x}d\boldsymbol{x}'\geqslant 0, \forall f(\cdot)\in L^2
∫∫ K ( x , x ′ ) f ( x ) f ( x ′ ) d x d x ′ ⩾ 0 , ∀ f ( ⋅ ) ∈ L 2
则一定存在一个特征空间ϕ ( x ) \boldsymbol{\phi}(\boldsymbol{x}) ϕ ( x ) K ( x , x ′ ) = ϕ ( x ) T ϕ ( x ′ ) K(\boldsymbol{x}, \boldsymbol{x}')=\boldsymbol{\phi}(\boldsymbol{x})^T\boldsymbol{\phi}(\boldsymbol{x}') K ( x , x ′ ) = ϕ ( x ) T ϕ ( x ′ )
一个最常用的核函数是高斯核函数 :
K ( x , x ′ ) = exp ( − ∥ x − x ′ ∥ 2 2 σ 2 ) K(\boldsymbol{x}, \boldsymbol{x}')=\exp\left(-\frac{\Vert \boldsymbol{x}-\boldsymbol{x}'\Vert^2}{2\sigma^2}\right)
K ( x , x ′ ) = exp ( − 2 σ 2 ∥ x − x ′ ∥ 2 )
其对应的特征空间是无穷维的:
ϕ ( x ) = e − x 2 / 2 σ 2 [ 1 , 1 1 ! σ 2 x , 1 2 ! σ 4 x 2 , … ] T \boldsymbol{\phi}(x)=e^{-x^2/2\sigma^2}\left[1, \sqrt{\frac{1}{1!\sigma^2}}x, \sqrt{\frac{1}{2!\sigma^4}}x^2, \dots\right]^T
ϕ ( x ) = e − x 2 /2 σ 2 [ 1 , 1 ! σ 2 1 x , 2 ! σ 4 1 x 2 , … ] T
所以利用核技巧,原来的分类器可以写为:
y ^ = sign ( ∑ l = 1 N α ( l ) y ( l ) K ( x ( l ) , x ) + b ∗ ) \hat y=\text{sign}\left(\sum_{l=1}^N\alpha^{(l)}y^{(l)}K(\boldsymbol{x}^{(l)}, \boldsymbol{x})+b^*\right)
y ^ = sign ( l = 1 ∑ N α ( l ) y ( l ) K ( x ( l ) , x ) + b ∗ )
5、与逻辑回归的联系
记h ( l ) = w T x ( l ) + b h^{(l)}=\boldsymbol{w}^T\boldsymbol{x}^{(l)}+b h ( l ) = w T x ( l ) + b
逻辑回归中,引入了正则项后,最终的优化目标是最小化:
L ( w , b ) = − 1 N ∑ l = 1 N [ y ( l ) log ( σ ( h ( l ) ) ) + ( 1 − y ( l ) ) log ( 1 − σ ( h ( l ) ) ) ] + λ ∥ w ∥ 2 L(\boldsymbol{w}, b)=\frac{-1}{N}\sum_{l=1}^N \left[y^{(l)}\log(\sigma(h^{(l)}))+(1-y^{(l)})\log(1-\sigma(h^{(l)}))\right]+\lambda\Vert \boldsymbol{w}\Vert^2
L ( w , b ) = N − 1 l = 1 ∑ N [ y ( l ) log ( σ ( h ( l ) )) + ( 1 − y ( l ) ) log ( 1 − σ ( h ( l ) )) ] + λ ∥ w ∥ 2
注意,支持向量机中的y ( l ) ∈ { − 1 , 1 } y^{(l)}\in \{-1, 1\} y ( l ) ∈ { − 1 , 1 }
L ( w , b ) = { − log ( σ ( h ) ) , y = 1 − log ( 1 − σ ( h ) ) = − log ( σ ( − h ) ) , y = − 1 L(\boldsymbol{w}, b)=
\begin{cases}
-\log(\sigma(h)), &y=1\\
-\log(1-\sigma(h))=-\log(\sigma(-h)), &y=-1
\end{cases}
L ( w , b ) = { − log ( σ ( h )) , − log ( 1 − σ ( h )) = − log ( σ ( − h )) , y = 1 y = − 1
也即有:
L ( w , b ) = log ( σ ( y ( l ) h ( l ) ) ) L(\boldsymbol{w}, b)=\log(\sigma(y^{(l)}h^{(l)}))
L ( w , b ) = log ( σ ( y ( l ) h ( l ) ))
所以按照支持向量机中标签的定义,逻辑回归的损失函数可以简单地写为:
L ( w , b ) = − 1 N ∑ l = 1 N log ( σ ( y ( l ) h ( l ) ) ) + λ ∥ w ∥ 2 = 1 N ∑ l = 1 N log ( 1 + exp ( − y ( l ) h ( l ) ) ) + λ ∥ w ∥ 2 L(\boldsymbol{w}, b)=\frac{-1}{N}\sum_{l=1}^N \log(\sigma(y^{(l)}h^{(l)}))+\lambda\Vert \boldsymbol{w}\Vert^2=\frac{1}{N}\sum_{l=1}^N \log(1+\exp(-y^{(l)}h^{(l)}))+\lambda\Vert \boldsymbol{w}\Vert^2
L ( w , b ) = N − 1 l = 1 ∑ N log ( σ ( y ( l ) h ( l ) )) + λ ∥ w ∥ 2 = N 1 l = 1 ∑ N log ( 1 + exp ( − y ( l ) h ( l ) )) + λ ∥ w ∥ 2
若记E L R ( z ) = log ( 1 + exp ( − z ) ) E_{LR}(z)=\log(1+\exp(-z)) E L R ( z ) = log ( 1 + exp ( − z ))
L ( w , b ) = 1 N ∑ l = 1 N E L R ( y ( l ) h ( l ) ) + λ ∥ w ∥ 2 L(\boldsymbol{w}, b)=\frac{1}{N}\sum_{l=1}^N E_{LR}(y^{(l)}h^{(l)})+\lambda\Vert \boldsymbol{w}\Vert^2
L ( w , b ) = N 1 l = 1 ∑ N E L R ( y ( l ) h ( l ) ) + λ ∥ w ∥ 2
在理想分类器中,对于单个数据点,可以这样定义损失函数(0-1 Loss):
L ( w , b ) = { 0 , y ( l ) h ( l ) > 0 1 , y ( l ) h ( l ) ⩽ 0 L(\boldsymbol{w}, b)=
\begin{cases}
0, &y^{(l)}h^{(l)}>0\\
1, &y^{(l)}h^{(l)}\leqslant 0
\end{cases}
L ( w , b ) = { 0 , 1 , y ( l ) h ( l ) > 0 y ( l ) h ( l ) ⩽ 0
若函数E I d e a l ( z ) E_{Ideal}(z) E I d e a l ( z )
E I d e a l ( z ) = { 0 , z > 0 1 , z ⩽ 0 E_{Ideal}(z)=
\begin{cases}
0, &z>0\\
1, &z\leqslant 0
\end{cases}
E I d e a l ( z ) = { 0 , 1 , z > 0 z ⩽ 0
于是整个数据集的损失函数可以写为:
L ( w , b ) = 1 N ∑ l = 1 N E I d e a l ( y ( l ) h ( l ) ) + λ ∥ w ∥ 2 L(\boldsymbol{w}, b)=\frac{1}{N}\sum_{l=1}^N E_{Ideal}(y^{(l)}h^{(l)})+\lambda\Vert \boldsymbol{w}\Vert^2
L ( w , b ) = N 1 l = 1 ∑ N E I d e a l ( y ( l ) h ( l ) ) + λ ∥ w ∥ 2
对于线性最大间隔分类器,我们定义:
E S V M ( z ) = { 0 , z ⩾ 0 + ∞ , z < 0 E_{SVM}(z)=
\begin{cases}
0, &z\geqslant 0\\
+\infty, &z<0
\end{cases}
E S V M ( z ) = { 0 , + ∞ , z ⩾ 0 z < 0
则也可以把优化目标写成类似的形式:
L ( w , b ) = 1 N ∑ l = 1 N E S V M ( y ( l ) h ( l ) − 1 ) + 1 2 ∥ w ∥ 2 L(\boldsymbol{w}, b)=\frac{1}{N}\sum_{l=1}^N E_{SVM}(y^{(l)}h^{(l)}-1)+\frac 1 2\Vert \boldsymbol{w}\Vert^2
L ( w , b ) = N 1 l = 1 ∑ N E S V M ( y ( l ) h ( l ) − 1 ) + 2 1 ∥ w ∥ 2
而线性软最大间隔分类器,定义:
E S o f t ( z ) = max ( 0 , 1 − z ) E_{Soft}(z)=\max(0, 1-z)
E S o f t ( z ) = max ( 0 , 1 − z )
这种损失就是Hinge Loss 。
由约束条件,有y ( l ) h ( l ) ⩾ 1 − ξ ( l ) y^{(l)}h^{(l)}\geqslant 1-\xi^{(l)} y ( l ) h ( l ) ⩾ 1 − ξ ( l ) ξ ( l ) ⩾ 1 − y ( l ) h ( l ) \xi^{(l)}\geqslant 1-y^{(l)}h^{(l)} ξ ( l ) ⩾ 1 − y ( l ) h ( l ) ξ ( l ) \xi^{(l)} ξ ( l ) ξ ( l ) ⩾ 0 \xi^{(l)}\geqslant 0 ξ ( l ) ⩾ 0
min ∑ l = 1 N ξ ( l ) = min ∑ l = 1 N max ( 0 , 1 − y ( l ) h ( l ) ) \min \sum_{l=1}^N \xi^{(l)}=\min \sum_{l=1}^N \max(0, 1-y^{(l)}h^{(l)})
min l = 1 ∑ N ξ ( l ) = min l = 1 ∑ N max ( 0 , 1 − y ( l ) h ( l ) )
于是优化目标就可以写为:
L ( w , b ) = C N ∑ l = 1 N ξ ( l ) + 1 2 ∥ w ∥ 2 = 1 N ∑ l = 1 N E S o f t ( y ( l ) h ( l ) ) + λ ∥ w ∥ 2 \begin{split}
L(\boldsymbol{w}, b)
&=\frac{C}{N}\sum_{l=1}^N \xi^{(l)}+\frac 1 2\Vert \boldsymbol{w}\Vert^2 \\
&=\frac{1}{N}\sum_{l=1}^N E_{Soft}(y^{(l)}h^{(l)})+\lambda\Vert \boldsymbol{w}\Vert^2
\end{split}
L ( w , b ) = N C l = 1 ∑ N ξ ( l ) + 2 1 ∥ w ∥ 2 = N 1 l = 1 ∑ N E S o f t ( y ( l ) h ( l ) ) + λ ∥ w ∥ 2
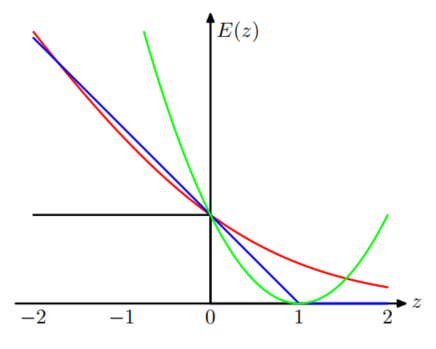
由上可见,逻辑回归、理想分类器、线性最大间隔分类器、线性软最大间隔分类器的损失函数都可以写为类似的形式,差别仅在于损失函数的定义。
下图是这几种分类器的损失函数的图像:
上面的四种损失函数依次对应红、黑、绿、蓝四条线。
第六讲 神经网络
1、神经网络
非线性模型在许多应用上取得了良好的效果。目前提到的非线性化模型的方法有两种:
利用基函数ϕ ( ⋅ ) \boldsymbol{\phi}(\cdot) ϕ ( ⋅ )
利用核技巧,可以理解为一个无限维的基函数变换
以上两种方法中,基函数(的参数)都是固定的,不能根据数据的特征进行调整。上述的两种方法可以用下图表示:
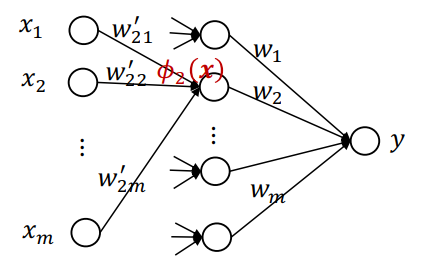
设想让“非线性化”过程中的参数是可学习的(可变的):
其中w 21 ′ , w 22 ′ , … , w 2 m ′ w_{21}', w_{22}', \dots, w_{2m}' w 21 ′ , w 22 ′ , … , w 2 m ′
一般地,令ϕ i ( x ) = a ( ∑ l = 1 m w i l ′ x l ) \phi_i(\boldsymbol{x})=a(\sum_{l=1}^m w_{i l}'x_l) ϕ i ( x ) = a ( ∑ l = 1 m w i l ′ x l ) a ( ⋅ ) a(\cdot) a ( ⋅ ) 激活函数 。激活函数一定要有(而且不能是线性函数),否则最终y y y x x x
于是上图的输出可以写为:
y ^ = w 2 T a ( W 1 x ) \hat{y}=\boldsymbol{w}_2^T a(\boldsymbol{W}_1 x)
y ^ = w 2 T a ( W 1 x )
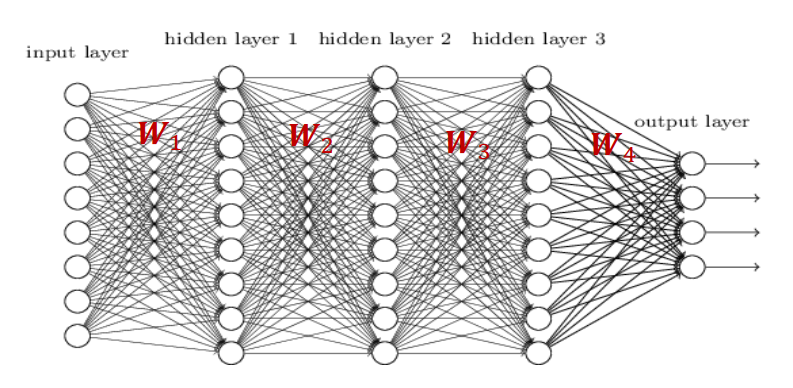
在此基础上,不断增加堆叠的层数:
一个L L L
y ^ = W L a ( ⋯ a ( W 2 a ( W 1 x ) ) ) \hat{y}=\boldsymbol{W}_La(\cdots a(\boldsymbol{W}_2a(\boldsymbol{W}_1 \boldsymbol{x})))
y ^ = W L a ( ⋯ a ( W 2 a ( W 1 x )))
其中最外层到底是矩阵W L \boldsymbol{W}_L W L w L \boldsymbol{w}_L w L softmax \text{softmax} softmax
介绍四种常见的激活函数:
sigmoid ( x ) = 1 1 + e − x \text{sigmoid}(x)=\frac{1}{1+e^{-x}}
sigmoid ( x ) = 1 + e − x 1
易有梯度消失现象
只输出正值
指数函数的计算代价高
tanh ( x ) = 1 − e − 2 x 1 + e − 2 x \text{tanh}(x)=\frac{1-e^{-2x}}{1+e^{-2x}}
tanh ( x ) = 1 + e − 2 x 1 − e − 2 x
易有梯度消失现象
指数函数的计算代价高
同时输出正值和负值
ReLU ( x ) = max ( 0 , x ) \text{ReLU}(x)=\max(0, x)
ReLU ( x ) = max ( 0 , x )
在x > 0 x>0 x > 0 x < 0 x<0 x < 0
计算效率高
只输出正值
Leaky Relu ( x ) = max ( 0.1 , x ) \text{Leaky Relu}(x)=\max(0.1, x)
Leaky Relu ( x ) = max ( 0.1 , x )
给定训练集D = { ( x i , y i ) } \mathcal{D}=\{(\boldsymbol{x}_i, y_i)\} D = {( x i , y i )}
L = 1 N ∑ ( x , y ) ∈ D ∣ y − y ^ ∣ 2 L=\frac 1 N\sum_{(\boldsymbol{x}, y)\in \mathcal{D}}|y-\hat{y}|^2
L = N 1 ( x , y ) ∈ D ∑ ∣ y − y ^ ∣ 2
多分类问题的损失函数可写为:
L = − 1 N ∑ ( x , y ) ∈ D ∑ k = 1 K y k log y k ^ L=-\frac 1 N\sum_{(\boldsymbol{x}, y)\in \mathcal{D}}\sum_{k=1}^K y_k\log \hat{y_k}
L = − N 1 ( x , y ) ∈ D ∑ k = 1 ∑ K y k log y k ^
2、反向传播
同样,我们使用梯度下降法来更新参数,需要计算∂ L ∂ W l \frac{\partial L}{\partial \boldsymbol{W}_l} ∂ W l ∂ L
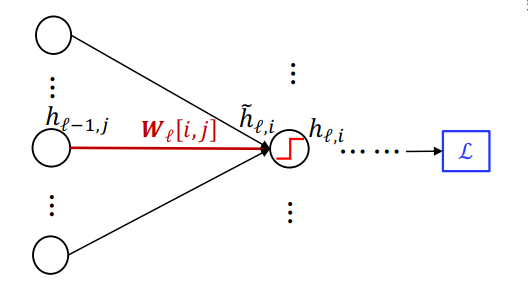
首先考虑一个局部:
这里W l , i , j W_{l, i, j} W l , i , j l l l l l l i i i j j j
∂ L ∂ W l , i , j = ∂ L ∂ h l , i ∂ h l , i ∂ h ~ l , i ∂ h ~ l , i ∂ W l , i , j = ∂ L ∂ h l , i ⋅ a ′ ( h ~ l , i ) ⋅ h l − 1 , j \begin{split}
\frac{\partial L}{\partial W_{l, i, j}}&=\frac{\partial L}{\partial h_{l, i}}\frac{\partial h_{l, i}}{\partial \tilde{h}_{l, i}}\frac{\partial \tilde{h}_{l, i}}{\partial W_{l, i, j}}\\
&=\frac{\partial L}{\partial h_{l, i}}\cdot a'(\tilde{h}_{l, i})\cdot h_{l-1, j}
\end{split}
∂ W l , i , j ∂ L = ∂ h l , i ∂ L ∂ h ~ l , i ∂ h l , i ∂ W l , i , j ∂ h ~ l , i = ∂ h l , i ∂ L ⋅ a ′ ( h ~ l , i ) ⋅ h l − 1 , j
所以计算对W l , i , j W_{l, i, j} W l , i , j h l , i h_{l, i} h l , i
下面看计算对h l , i h_{l, i} h l , i
有:
∂ L ∂ h l , i = ∑ j = 1 m ∂ L ∂ h l + 1 , j ∂ h l + 1 , j ∂ h l , j = ∑ j = 1 ∂ L ∂ h l + 1 , j ⋅ a ′ ( h ~ l + 1 , j ) ⋅ W l + 1 , j , i \begin{split}
\frac{\partial L}{\partial h_{l, i}}&=\sum_{j=1}^m\frac{\partial L}{\partial h_{l+1, j}}\frac{\partial h_{l+1, j}}{\partial h_{l, j}}\\
&=\sum_{j=1}\frac{\partial L}{\partial h_{l+1, j}}\cdot a'(\tilde{h}_{l+1, j})\cdot W_{l+1, j, i}
\end{split}
∂ h l , i ∂ L = j = 1 ∑ m ∂ h l + 1 , j ∂ L ∂ h l , j ∂ h l + 1 , j = j = 1 ∑ ∂ h l + 1 , j ∂ L ⋅ a ′ ( h ~ l + 1 , j ) ⋅ W l + 1 , j , i
所以计算对对h l , i h_{l, i} h l , i h l + 1 , j h_{l+1, j} h l + 1 , j
综上,可以从后往前,一步步的计算出对所有参数的梯度。梯度是从后往前传播的,于是把这个过程称之为反向传播 。
利用反向传播计算参数的过程总共可以分为两步
计算:∂ L ∂ h l = W l + 1 T ( a l + 1 ′ ⊙ ∂ L ∂ h l + 1 ) , a l + 1 ′ = [ a ′ ( h ~ l + 1 , 1 ) , a ′ ( h ~ l + 1 , 2 ) , ⋯ , a ′ ( h ~ l + 1 , m ) ] T \frac{\partial L}{\partial \boldsymbol{h}_l}=\boldsymbol{W}_{l+1}^T({\boldsymbol{a}}'_{l+1}\odot \frac{\partial L}{\partial \boldsymbol{h}_{l+1}}),{\boldsymbol{a}}'_{l+1}=[a'(\tilde{h}_{l+1, 1}), a'(\tilde{h}_{l+1, 2}), \cdots, a'(\tilde{h}_{l+1, m})]^T
∂ h l ∂ L = W l + 1 T ( a l + 1 ′ ⊙ ∂ h l + 1 ∂ L ) , a l + 1 ′ = [ a ′ ( h ~ l + 1 , 1 ) , a ′ ( h ~ l + 1 , 2 ) , ⋯ , a ′ ( h ~ l + 1 , m ) ] T
计算:∂ L ∂ W l = ( a l ′ ⊙ ∂ L ∂ h l ) h l − 1 T \frac{\partial L}{\partial \boldsymbol{W}_l}=({\boldsymbol{a}}'_{l}\odot \frac{\partial L}{\partial \boldsymbol{h}_{l}})\boldsymbol{h}_{l-1}^T
∂ W l ∂ L = ( a l ′ ⊙ ∂ h l ∂ L ) h l − 1 T
3、各种类型的神经网络
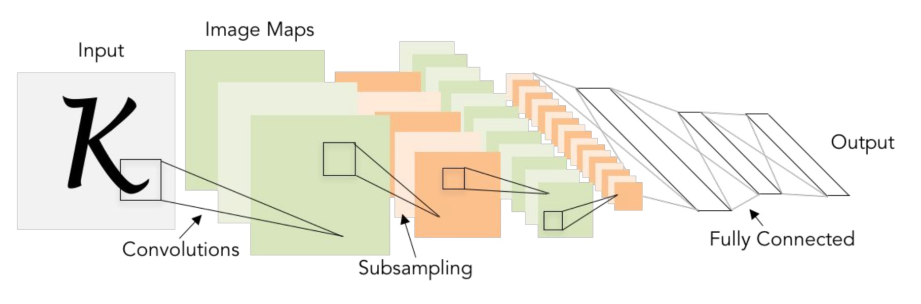
3.1、CNN
Convolutional Neural Networks,卷积神经网络
上述的普通全连接网络(多层感知机,MLP)有以下缺点:
参数数量巨大,容易过拟合
没有考虑数据数据中潜在的结构信息
CNN 就是一种可以利用图片/视觉信息中潜在结构的网络。
二维图像可以理解为二维矩阵,用过滤器(Filter)对原始图像做卷积,“提取”出特征信息:
CNN 中,基本的结构是卷积层+ReLU+池化层:
这种结构可以多次堆叠。其特点是:
更详细生动的解释可以查看人工智能笔记。
下面介绍几种具体的 CNN:
LeNet,其结构是卷积层+池化层+卷积层+池化层+全连接层+全连接层:
AlexNet 则结构更多更复杂,包括五个卷积层和三个全连接层:
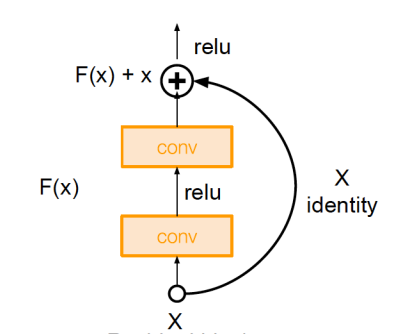
ResNet 则有 152 层。层数不是越多越好,层数越多,意味着参数越多,也越难以训练。ResNet 还引入了残差连接 (Shortcut Connection),创建了一些直接让相隔的层相连的连接。如下图中的弧线就是残差连接:
3.2、RNN
Recurrent Neural Network,循环神经网络 ,其核心思想是会考虑网络的隐藏状态,使得模型能够“记忆”之前的信息。
每个新的输入都会更新隐藏状态,输出要同时考虑输入和上一个隐藏状态。这样就能够考虑到前后数据潜在的依赖关系
多到多的 RNN:
应用的例子有语言模型、视频帧分类等
多到一的 RNN:
应用的例子有序列分类、情感分析等
一到多的 RNN:
应用的例子有图片内容分析等
多到一(编码器)+一到多(解码器)的 RNN:
应用的例子有机器翻译、语句特征提取等。
LSTM,长短期记忆网络,引入了一个特殊的结构来精细控制记忆的内容:
通过引入门控机制来控制信息流,是一种有效解决梯度消失问题并捕捉长期依赖关系的循环神经网络。
第七讲 优化算法与训练技术
1、优化算法
1.1、随机梯度下降
Stochastic Gradient Descent,SGD。基本思想是使用部分样本计算损失,然后继续梯度下降。
用数学形式来表达即:
w t + 1 = w t − η ∇ L ( x , y ; w t ) \boldsymbol{w}_{t+1}= \boldsymbol{w}_t-\eta \nabla L(\boldsymbol{x}, y; \boldsymbol{w}_t)
w t + 1 = w t − η ∇ L ( x , y ; w t )
其中η \eta η ∇ L ( x , y ; w t ) \nabla L(\boldsymbol{x}, y; \boldsymbol{w}_t) ∇ L ( x , y ; w t )
SGD 的问题是,非常容易陷入局部最优,且解空间中一些病态弯曲 (pathological curvature)造成收敛缓慢,如下图:
SGD 的路线会是图中的折线,而不是我们期望的直线。
1.2、SGD+Momentum
SGD+Momentum 是在 SGD 的基础上引入了动量项 ,其更新公式为:
v t = ρ v t − 1 + ∇ L ( x , y ; w t ) w t + 1 = w t − η v t \begin{align*}
\boldsymbol{v}_{t}&=\rho \boldsymbol{v}_{t-1}+\nabla L(\boldsymbol{x}, y;\boldsymbol{w}_t)\\
\boldsymbol{w}_{t+1}&=\boldsymbol{w}_t-\eta \boldsymbol{v}_t
\end{align*}
v t w t + 1 = ρ v t − 1 + ∇ L ( x , y ; w t ) = w t − η v t
其中ρ ∈ ( 0 , 1 ) \rho\in(0, 1) ρ ∈ ( 0 , 1 ) 动量因子 ,常选择的值是 0.9、0.95、0.99。
这里的动量项与物理学中的动量类似。可以想象,一个小球从坡上滚下,首先由于有重力,下坡速度越来越快,动量越来越大;其次如果遇到一个上坡,积累的动量有益于克服上坡的阻力帮其脱出。也就是说,引入动量项可以加速收敛,避免陷入局部最优。
1.3、RMSProp
Root Mean Square Propagation,均方根传播 。其更新公式为:
s t = ρ s t − 1 + ( 1 − ρ ) ( ∇ L ( x , y ; w t ) ) 2 w t + 1 = w t − η ∇ L ( x , y ; w t ) ⊘ s t \begin{align*}
\boldsymbol{s}_t&=\rho \boldsymbol{s}_{t-1}+(1-\rho)(\nabla L(\boldsymbol{x}, y; \boldsymbol{w}_t))^2\\
\boldsymbol{w}_{t+1}&=\boldsymbol{w}_t-\eta\nabla L(\boldsymbol{x}, y; \boldsymbol{w}_t)\oslash \sqrt{\boldsymbol{s}_t}
\end{align*}
s t w t + 1 = ρ s t − 1 + ( 1 − ρ ) ( ∇ L ( x , y ; w t ) ) 2 = w t − η ∇ L ( x , y ; w t ) ⊘ s t
其中⊘ \oslash ⊘ s t \boldsymbol{s_t} s t ⊘ s t \oslash \sqrt{\boldsymbol{s}_t} ⊘ s t
将更新式子展开后即可发现,在衰减因子的作用下,时间越早的梯度对更新的影响越小,这也是常见的思想。
1.4、Adam
Adaptive Moment Estimation 的缩写,是一种结合了 Momentum 和 RMSProp 的优化算法。其更新公式为:
m t = β 1 m t − 1 + ( 1 − β 1 ) ∇ L ( x , y ; w t ) s t = β 2 s t − 1 + ( 1 − β 2 ) ( ∇ L ( x , y ; w t ) ) 2 w t + 1 = w t − η m t ⊘ s t \begin{align*}
\boldsymbol{m}_t&=\beta_1\boldsymbol{m}_{t-1}+(1-\beta_1)\nabla L(\boldsymbol{x}, y; \boldsymbol{w}_t)\\
\boldsymbol{s}_t&=\beta_2\boldsymbol{s}_{t-1}+(1-\beta_2)(\nabla L(\boldsymbol{x}, y; \boldsymbol{w}_t))^2\\
\boldsymbol{w}_{t+1}&=\boldsymbol{w}_t-\eta\boldsymbol{m}_t\oslash \sqrt{\boldsymbol{s}_t}
\end{align*}
m t s t w t + 1 = β 1 m t − 1 + ( 1 − β 1 ) ∇ L ( x , y ; w t ) = β 2 s t − 1 + ( 1 − β 2 ) ( ∇ L ( x , y ; w t ) ) 2 = w t − η m t ⊘ s t
其中m t \boldsymbol{m}_t m t β 1 = 0 \beta_1=0 β 1 = 0
参数的一组常见设置是β 1 = 0.9 , β 2 = 0.999 , η = 0.001 \beta_1=0.9, \beta_2=0.999, \eta=0.001 β 1 = 0.9 , β 2 = 0.999 , η = 0.001
2、训练技巧
2.1、预处理
一些经常使用的数据处理方法包括:
中心化 :例如同时减去均值归一化 :每个维度的数据都除以标准差白化 (Whitening)数据
下图直观地展示了这三种方法的效果:
下面讨论中心化和归一化数据的有效性。考虑一个线性回归问题,其损失函数是:
L ( w ) = 1 n ∥ X w − y ∥ 2 L(\boldsymbol{w})=\frac 1 n \Vert \boldsymbol{X}\boldsymbol{w}-\boldsymbol{y}\Vert^2
L ( w ) = n 1 ∥ X w − y ∥ 2
由于各个特征值可能数量级不同,则不同维度的相同步进,对损失函数值的影响会有很大不同,这导致收敛缓慢。中心化和正则化就是在将不同维度的特征值调整到相同的数量级。
2.2、初始化
从固定高斯分布随机取样来初始化神经网络中各层的权重,尤其是在较浅的神经网络(层数小于 8)时,会取得较好的效果。一个常用的高斯分布是:
w ∼ N ( 0 , 0.01 2 ) \boldsymbol{w}\sim N(0, 0.01^2)
w ∼ N ( 0 , 0.0 1 2 )
如果激活函数使用的是ReLU \text{ReLU} ReLU
w ∼ N T ( 0 , 0.01 2 ) \boldsymbol{w}\sim N_T(0, 0.01^2)
w ∼ N T ( 0 , 0.0 1 2 )
如果神经网络较深,可以通过对以下高斯分布进行采样,来对计算出第i i i
w ∼ N ( 0 , σ i 2 ) \boldsymbol{w}\sim N(0, \sigma_i^2)
w ∼ N ( 0 , σ i 2 )
其中σ i \sigma_i σ i i − 1 i-1 i − 1
2.3、Dropout
基本思想是在前向传播的过程中,随机地“丢弃一些节点”,也即将一些节点的输出设置为 0。这样可以有效防止过拟合,尤其是在深度神经网络中。
将模型用于测试时,我们一般希望对于相同的输入能得到相同的输出,所以此时要关掉 Dropout。
另一个问题出现了,模型中的参数,是适合训练时的数据的。而训练时数据由于有 Dropout,每层的输入都会小于原始输入。所以测试时,每层的输入也要加上 Dropout 的概率:
h l + 1 = σ ( p W l h l ) \boldsymbol{h}_{l+1}=\sigma(p \boldsymbol{W}_l \boldsymbol{h}_l)
h l + 1 = σ ( p W l h l )
2.4、批量归一化
Batch Normalization,BN。其基本思想是在每一层的输入上进行归一化。
一个好的初始化可以让模型一开始在解空间中处于一个正常的位置,但是随着训练的进行,初始化的效果越来越弱,最后还是取决于训练过程的好坏。
一种解决方法就是引入 BN 层,将某一个隐藏层的输出{ h l ( i ) } i = 1 N \{\boldsymbol{h}_l^{(i)}\}_{i=1}^N { h l ( i ) } i = 1 N
h ^ l ( i ) = ( h l ( i ) − μ l ) ⊘ σ l \hat{\boldsymbol{h}}_l^{(i)}=(\boldsymbol{h}_l^{(i)}-\boldsymbol{\mu}_l)\oslash \boldsymbol{\sigma}_l
h ^ l ( i ) = ( h l ( i ) − μ l ) ⊘ σ l
其中μ l , σ l 2 \boldsymbol{\mu}_l, \boldsymbol{\sigma}_l^2 μ l , σ l 2 h l ( i ) \boldsymbol{h}_l^{(i)} h l ( i ) γ l , β l \boldsymbol{\gamma}_l, \boldsymbol{\beta}_l γ l , β l
h ~ l ( i ) = γ l ⊙ h ^ l ( i ) + β l \tilde{\boldsymbol{h}}_l^{(i)}=\boldsymbol{\gamma}_l\odot\hat{\boldsymbol{h}}_l^{(i)}+\boldsymbol{\beta}_l
h ~ l ( i ) = γ l ⊙ h ^ l ( i ) + β l
其中⊙ \odot ⊙
同样考虑利用模型进行测试时,输出依赖于每个小批次的均值和方差,导致输出不稳定。一般有两个解决方法:
BN 层统一采用整个训练集的均值和方差
用移动平均来估计均值和方差
最后,整个 BN 层的计算过程可以写为:
BN ( h l ) = γ l ⊙ ( h l − μ l ) ⊘ σ l + β l \text{BN}(\boldsymbol{h}_l)=\boldsymbol{\gamma}_l\odot(\boldsymbol{h}_l-\boldsymbol{\mu}_l)\oslash \boldsymbol{\sigma}_l+\boldsymbol{\beta}_l
BN ( h l ) = γ l ⊙ ( h l − μ l ) ⊘ σ l + β l
2.5、超参数调整
学习率等超参数的调整也不是盲目的,有一些一般性的方法:
首先尝试在许多问题上表现优异的超参数
根据训练结果逐渐来调整
不同超参数表现出来的 loss 曲线如下图:
第八讲 决策树
Decision Tree,DT。
决策树也是一种分类器,但是与之前提到的线性回归/逻辑回归/支持向量机等分类器不同,决策树分类器是通过建立一个树形结构来进行分类。
1、基本概念
决策树中:
根节点和内部节点表示一个属性(特征)
叶子节点对应一个(最终被划分为的)类别
边对应某个属性值
利用决策树进行分类,就是从根节点开始,根据属性值逐步向下,直到到达叶子节点。叶子节点的类别就是最终的分类结果。
学习出一个好的决策树,要考虑:
每个节点上用哪个属性进行划分(可以重复使用属性)
某个节点引出哪些边(如何划分属性值)
何时停止拓展决策树
2、选择属性的标准
生活中,我们对物体进行分类,一般会从最明显的特征入手,或者说从“包含最多信息”的特征入手,在决策树中也是如此。
我们先来介绍熵 (Entropy)的概念,它是对随机变量的不确定性的度量。给定一个随机变量Z ∼ p ( z ) Z\sim p(z) Z ∼ p ( z )
H ( Z ) = − ∑ z ∈ Z p ( z ) log p ( z ) H(Z)=-\sum_{z\in \mathcal{Z}}p(z)\log p(z)
H ( Z ) = − z ∈ Z ∑ p ( z ) log p ( z )
其中Z \mathcal{Z} Z Z Z Z
熵越大,变量取值的不确定性越大。如果变量在各种情况下取值都是相同的,则不能够通过这个变量来区分不同的情况,也即熵最大;如果变量在各种情况下取值都是不同的,则可以通过这个变量来区分不同的情况,也即熵最小。一句话:分布越平坦(均匀),熵越大。
条件熵是在给定一个随机变量Y Y Y Z Z Z
H ( Z ∣ Y ) = ∑ y ∈ Y p ( Y = y ) H ( Z ∣ Y = y ) H(Z|Y)=\sum_{y\in \mathcal{Y}}p(Y=y)H(Z|Y=y)
H ( Z ∣ Y ) = y ∈ Y ∑ p ( Y = y ) H ( Z ∣ Y = y )
我们总有H ( Z ) ⩾ H ( Z ∣ Y ) H(Z)\geqslant H(Z|Y) H ( Z ) ⩾ H ( Z ∣ Y ) Y Y Y Z Z Z
最终我们引出信息增益 (Information Gain)的概念。Y Y Y I G ( Y ) IG(Y) I G ( Y ) Y Y Y Z Z Z
I G ( Y ) = H ( Z ) − H ( Z ∣ Y ) IG(Y)=H(Z)-H(Z|Y)
I G ( Y ) = H ( Z ) − H ( Z ∣ Y )
3、构建决策树
从根节点开始,我们计算知道各个属性对确定最后分类结果带来的信息增益,选择信息增益最大 的属性作为根节点。
接下来,根据根节点各个属性的取值,将数据集划分为若干个子集,对每个子集递归地重复上述过程,用其他属性来构建子树。
当某个节点的所有样本都属于同一类别时,停止拓展。
还有其他可能的停止拓展的条件:所有属性都已使用过、树达到最大深度、信息增益值小于某个阈值等。
树过大或者过复杂时,容易过拟合,可以通过剪枝来解决这个问题。
利用验证集,可以在构建过程中或者构建结束后使用下面的策略:
减去某个节点不影响验证集的准确率
减去对验证集准确率提升最小的节点
验证集上的准确率开始下降即停止扩展
第九讲 集成学习
训练单个的,在所有数据上都表现优异的分类器(Strong Classifier)是困难的。但是,如果我们能够训练多个较弱的分类器(Weak Classifier),虽然它们每一个单拿出来在所有数据集上表现一般,但是对某一部分数据集表现优异,那么我们就可以通过用适当的方法将这些弱分类器组合起来,得到一个强分类器。这就是集成学习 (Ensemble Learning)的基本思想。
主要要解决两个问题:
弱分类器有很多种类,可以是决策树、SVM、神经网络等。
组合方式有两大类,无权的和加权的。
1、Bagging
Bootstrap Aggregating,自举汇聚法 。
我们无法预知怎样划分数据,然后再在上面训练弱分类器并组合能取得最好的效果。可以转换思路,可以训练一些预测误差相互独立的弱分类器,这样相当于考虑不同方面的特征,最后再将这些弱分类器组合起来。
为了实现这一点,从原始数据集中随机取样 出若干个大小相同的子集,然后在每个子集上训练一个弱分类器,最后将这些弱分类器组合起来。Bagging 中,最后利用弱分类器组合的方式是多数通过 (Majority Voting),即对于每个样本,所有弱分类器投票,预测结果是得票最多的类别;或者对于回归问题,用所有弱分类器输出的平均值。可见 Bagging 是一种无权 的组合方式。
这种方式下,各个弱分类器的误差可能还是有较大的相关性,我们可以进一步增加随机性。例如,如果弱分类器采用的是决策树,我们可以在构建决策树是,只使用随机地抽取的部分属性。这样每个决策树的形状都不尽相同,是一片随机森林 (Random Forest)。
2、Boosting
这种方法的基本思想是,每次训练一个弱分类器,对于被误分类的样本,给予其更大的权重,然后投入到下一个弱分类器的训练中。最后将所有弱分类器带权组合起来。
具体有 AdaBoost (Adaptive Boosting)算法:
初始化样本权重w i ( 0 ) = 1 N , i = 1 , 2 , ⋯ , N w_i^{(0)}=\frac 1 N, i=1, 2, \cdots, N w i ( 0 ) = N 1 , i = 1 , 2 , ⋯ , N
对于第k k k h k ( x ) h_k(\boldsymbol{x}) h k ( x ) w ( k − 1 ) \boldsymbol{w}^{(k-1)} w ( k − 1 )
训练结束后,计算错误率:ϵ k = ∑ i = 1 N w i ( k − 1 ) I ( h k ( x i ) ≠ y i ) ∑ i = 1 N w i ( k − 1 ) \epsilon_k=\frac{\sum_{i=1}^N w_i^{(k-1)}I(h_k(\boldsymbol{x}_i)\neq y_i)}{\sum_{i=1}^N w_i^{(k-1)}}
ϵ k = ∑ i = 1 N w i ( k − 1 ) ∑ i = 1 N w i ( k − 1 ) I ( h k ( x i ) = y i )
也即是被误分类的样本的权重之和占所有样本权重之和的比例
该分类器在最终组合中的权重为α k = 1 2 ln 1 − ϵ k ϵ k \alpha_k=\frac 1 2 \ln \frac{1-\epsilon_k}{\epsilon_k}
α k = 2 1 ln ϵ k 1 − ϵ k
更新样本权重,用于下一轮训练:w i ( k ) = w i ( k − 1 ) exp ( − α k y i h k ( x i ) ) w_i^{(k)}=w_i^{(k-1)}\exp(-\alpha_k y_i h_k(\boldsymbol{x}_i))
w i ( k ) = w i ( k − 1 ) exp ( − α k y i h k ( x i ))
由上述训练过程可见,误分类的样本权重会增大,正确分类的样本权重会减小,这样可以使得下一个弱分类器更关注于误分类的样本,这是一个增强 的过程。同时还可以发现,最后的组合是带权的,与弱分类器的表现有关。
一个典型的误分类率曲线如下图所示:
考虑定义一个指数损失函数 :
L ( w ) = ∑ i = 1 N exp ( − y i h ( x i ) ) L(\boldsymbol{w})=\sum_{i=1}^N \exp(-y_i h(\boldsymbol{x}_i))
L ( w ) = i = 1 ∑ N exp ( − y i h ( x i ))
其中h ( x i ) h(\boldsymbol{x}_i) h ( x i )
h ( x ) = ∑ i = 1 K α i h i ( x ) h(\boldsymbol{x})=\sum_{i=1}^K \alpha_i h_i(\boldsymbol{x})
h ( x ) = i = 1 ∑ K α i h i ( x )
可以证明,AdaBoost 算法等价于在最小化指数损失函数。
第十讲 PCA
Principal Component Analysis,主成分分析 。
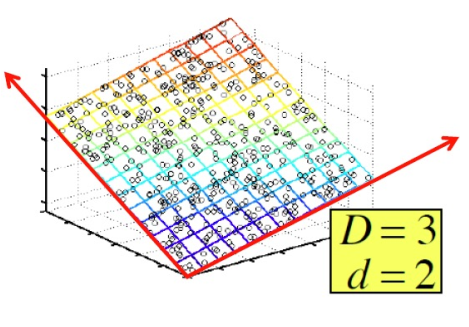
现实问题中,许多数据的维度都是巨大的,如果直接拿来计算,代价非常高。而且,数据的维度往往是冗余的,经常出现高维数据驻留在近似的低维空间的情况,如下图:
原始数据虽然是三维的,但近似可以认为都在一个二维平面上。
所以如果我们能找到数据分布的主要方向 ,就能用较少的维度来表示数据,从而节省计算资源。
1、角度一——最小化误差
由于我们抛弃了一些维度,误差是客观存在的,但是我们希望重建后数据与原始数据的误差尽可能小。
如果给定一组正交基,也即一组向量u 1 , u 2 , ⋯ , u M \boldsymbol{u}_1, \boldsymbol{u}_2, \cdots, \boldsymbol{u}_M u 1 , u 2 , ⋯ , u M
u i T u j = δ i , j = { 1 , i = j 0 , i ≠ j \boldsymbol{u}_i^T\boldsymbol{u}_j=\delta_{i, j}=\begin{cases}1, & i=j\\
0, & i\neq j
\end{cases}
u i T u j = δ i , j = { 1 , 0 , i = j i = j
在这组正交基张成的空间中,某个向量x \boldsymbol{x} x
x ~ = ∑ i = 1 M α i u i \tilde{\boldsymbol{x}}=\sum_{i=1}^M \alpha_i\boldsymbol{u}_i
x ~ = i = 1 ∑ M α i u i
其中α i = u i T x \alpha_i=\boldsymbol{u}_i^T\boldsymbol{x} α i = u i T x
这是因为最小化误差等价于:
min ∥ x − x ~ ∥ 2 = min ∥ x − ∑ i = 1 M α i u i ∥ 2 = min ( ∥ x ∥ 2 − ∑ i = 1 M α i u i T x + ∑ i = 1 M α i 2 ) \min \Vert \boldsymbol{x}-\tilde{\boldsymbol{x}}\Vert^2=\min \Vert \boldsymbol{x}-\sum_{i=1}^M \alpha_i\boldsymbol{u}_i\Vert^2=\min (\Vert \boldsymbol{x}\Vert^2-\sum_{i=1}^M \alpha_i \boldsymbol{u}_i^T\boldsymbol{x}+\sum_{i=1}^M \alpha_i^2)
min ∥ x − x ~ ∥ 2 = min ∥ x − i = 1 ∑ M α i u i ∥ 2 = min ( ∥ x ∥ 2 − i = 1 ∑ M α i u i T x + i = 1 ∑ M α i 2 )
这是一个凸优化问题,其解就是α i = u i T x \alpha_i=\boldsymbol{u}_i^T\boldsymbol{x} α i = u i T x
接下来就是确定一组正交基,能够最小化这个最小的误差。一般,我们处理x − x ‾ \boldsymbol{x}-\overline{\boldsymbol{x}} x − x x \boldsymbol{x} x x ‾ \overline{\boldsymbol{x}} x
我们的目标即是最小化整个数据集的平均重建误差 :
E = 1 N ∑ i = 1 N ∥ ( x i − x ‾ ) − x ~ i ∥ 2 E=\frac 1 N \sum_{i=1}^N \Vert (\boldsymbol{x}_i-\overline{\boldsymbol{x}})-\tilde{\boldsymbol{x}}_i\Vert^2
E = N 1 i = 1 ∑ N ∥ ( x i − x ) − x ~ i ∥ 2
当然,我们已知α i , j = u j T ( x i − x ‾ ) \alpha_{i, j}=\boldsymbol{u}_j^T(\boldsymbol{x}_i-\overline{\boldsymbol{x}}) α i , j = u j T ( x i − x )
E = 1 N ∑ i = 1 N ∥ x i − x ‾ ∥ 2 − ∑ i = 1 M u i T 1 N ∑ j = 1 N ( x i − x ‾ ) ( x i − x ‾ ) T u i E=\frac 1 N \sum_{i=1}^N \Vert \boldsymbol{x}_i-\overline{\boldsymbol{x}}\Vert^2-\sum_{i=1}^M \boldsymbol{u}_i^T \frac 1 N \sum_{j=1}^N (\boldsymbol{x}_i-\overline{\boldsymbol{x}})(\boldsymbol{x}_i-\overline{\boldsymbol{x}})^T\boldsymbol{u}_i
E = N 1 i = 1 ∑ N ∥ x i − x ∥ 2 − i = 1 ∑ M u i T N 1 j = 1 ∑ N ( x i − x ) ( x i − x ) T u i
其中1 N ∑ j = 1 N ( x i − x ‾ ) ( x i − x ‾ ) T \frac 1 N \sum_{j=1}^N (\boldsymbol{x}_i-\overline{\boldsymbol{x}})(\boldsymbol{x}_i-\overline{\boldsymbol{x}})^T N 1 ∑ j = 1 N ( x i − x ) ( x i − x ) T S \boldsymbol{S} S
则整个误差最终可以写成下面的形式:
E = 1 N ∥ X − X ‾ ∥ F 2 − 1 N ∑ i = 1 M u i T S u i E=\frac 1 N \Vert \boldsymbol{X}-\overline{\boldsymbol{X}}\Vert_F^2-\frac 1 N\sum_{i=1}^M \boldsymbol{u}_i^T\boldsymbol{S}\boldsymbol{u}_i
E = N 1 ∥ X − X ∥ F 2 − N 1 i = 1 ∑ M u i T S u i
可以证明,与其等价的约束问题:
max u i ∑ i = 1 M u i T S u i s.t. u i T u i = δ i , j \max_{\boldsymbol{u}_i} \sum_{i=1}^M \boldsymbol{u}_i^T\boldsymbol{S}\boldsymbol{u}_i\quad\text{s.t.} \boldsymbol{u}_i^T\boldsymbol{u}_i=\delta_{i, j}
u i max i = 1 ∑ M u i T S u i s.t. u i T u i = δ i , j
的解是S \boldsymbol{S} S M M M S ∈ R D × D \boldsymbol{S}\in \mathbb{R}^{D\times D} S ∈ R D × D D D D
2、角度二——最大化方差
另一个角度是最大化重建数据的方差。可以想象,把面上数据投影到一条线上,如果所有的数据都集中在线上某个点附近,则几乎无法区分数据,携带的信息很少;如果数据比较松散地分布在较大的范围内,容易区分出每个点,携带的信息就比较多。
由方差的定义,可以写出在某个方向u j \boldsymbol{u}_j u j
V = 1 N ∑ i = 1 N ( u j T ( x i − x ‾ ) ) 2 = u j T S u j V=\frac 1 N \sum_{i=1}^N (\boldsymbol{u_j}^T(\boldsymbol{x}_i-\overline{\boldsymbol{x}}))^2=\boldsymbol{u}_j^T\boldsymbol{S}\boldsymbol{u}_j
V = N 1 i = 1 ∑ N ( u j T ( x i − x ) ) 2 = u j T S u j
这与我们在上一个角度得到的形式是一样的。
3、角度三——奇异值分解
一个矩阵A ∈ R M × N \boldsymbol{A} \in \mathbb{R}^{M\times N} A ∈ R M × N
A = U Σ V T \boldsymbol{A}=\boldsymbol{U}\boldsymbol{\Sigma}\boldsymbol{V}^T
A = U Σ V T
其中U = [ u 1 , u 2 , ⋯ , u M ] ∈ R M × M \boldsymbol{U}=[\boldsymbol{u}_1, \boldsymbol{u}_2, \cdots, \boldsymbol{u}_M]\in \mathbb{R}^{M\times M} U = [ u 1 , u 2 , ⋯ , u M ] ∈ R M × M V = [ v 1 , v 2 , ⋯ , v N ] ∈ R N × N \boldsymbol{V}=[\boldsymbol{v}_1, \boldsymbol{v}_2, \cdots, \boldsymbol{v}_N]\in \mathbb{R}^{N\times N} V = [ v 1 , v 2 , ⋯ , v N ] ∈ R N × N u i \boldsymbol{u}_i u i v i \boldsymbol{v}_i v i A A T \boldsymbol{A}\boldsymbol{A}^T A A T A T A \boldsymbol{A}^T\boldsymbol{A} A T A Σ \boldsymbol{\Sigma} Σ
由于Σ \boldsymbol{\Sigma} Σ A \boldsymbol{A} A
A = ∑ i = 1 r Σ i , i u i v i T = U ′ Σ ′ V ′ \boldsymbol{A}=\sum_{i=1}^r \Sigma_{i, i}\boldsymbol{u}_i\boldsymbol{v}_i^T=\boldsymbol{U}'\boldsymbol{\Sigma}'\boldsymbol{V}'
A = i = 1 ∑ r Σ i , i u i v i T = U ′ Σ ′ V ′
如果取A = X − X ‾ \boldsymbol{A}=\boldsymbol{X}-\overline{\boldsymbol{X}} A = X − X A A T = N S \boldsymbol{A}\boldsymbol{A}^T=N\boldsymbol{S} A A T = N S A A T \boldsymbol{A}\boldsymbol{A}^T A A T S \boldsymbol{S} S
综上可见,三个角度的 PCA 都是等价的。
第十一讲 K-means 聚类
给定一组数据{ x i } \{\boldsymbol{x}_i\} { x i }
簇内的数据点尽可能相似,簇间的数据点尽可能不同。
K-means 是一种常见的聚类算法,其流程如下:
假如要将数据分成K K K K K K μ k \boldsymbol{\mu}_k μ k
对于每一个数据点,分配到最近的中心点所代表的簇。若用r i , k ∈ { 0 , 1 } r_{i, k}\in\{0, 1\} r i , k ∈ { 0 , 1 } x i \boldsymbol{x}_i x i k k k r i , k = { 1 , if k = arg min j ∥ x i − μ j ∥ 2 0 , otherwise r_{i, k}=\begin{cases}
1, & \text{if } k=\arg\min_j \Vert \boldsymbol{x}_i-\boldsymbol{\mu}_j\Vert^2\\
0, & \text{otherwise}
\end{cases}
r i , k = { 1 , 0 , if k = arg min j ∥ x i − μ j ∥ 2 otherwise
更新中心点,使得每个簇的中心点是簇内所有数据点的平均值:μ k = ∑ i = 1 N r i , k x i ∑ i = 1 N r i , k \boldsymbol{\mu}_k=\frac{\sum_{i=1}^N r_{i, k}\boldsymbol{x}_i}{\sum_{i=1}^N r_{i, k}}
μ k = ∑ i = 1 N r i , k ∑ i = 1 N r i , k x i
接下来讨论 K-means 是否收敛。
可以定义如下目标函数:
J = ∑ i = 1 N ∑ k = 1 K r i , k ∥ x i − μ k ∥ 2 J=\sum_{i=1}^N \sum_{k=1}^K r_{i, k}\Vert \boldsymbol{x}_i-\boldsymbol{\mu}_k\Vert^2
J = i = 1 ∑ N k = 1 ∑ K r i , k ∥ x i − μ k ∥ 2
这个目标函数的含义是,每个数据点到其所属簇中心的距离之和。K-means 就相当于在最小化这个目标函数。易知,J J J J J J
易知,随着K K K J J J K K K
K-means 聚类的效果还与初始中心点高度相关。一般有以下几种初始化方法:
随机初始化。这种方法可能导致初始生成邻近的中心点,使得最终聚类效果不好
基于距离的初始化。第一个中心点随机生成,接下来选择离现存中心点最远的数据点作为下一个中心点。这种方法的问题是可能选择到一些离群点。
随机+基于距离的初始化。先随机生成一个中心点,然后基于距离选择下一个中心点,剩下的距离离目前的中心点越远,被选中的概率越大。
K-means 也有一些问题,例如对离群值敏感,难以处理非球形簇等。
有一种改进是软 K-means 。r i , k r_{i, k} r i , k x i \boldsymbol{x}_i x i k k k
r i , k = exp ( − ∥ x i − μ k ∥ 2 ) ∑ j = 1 K exp ( − ∥ x i − μ j ∥ 2 ) r_{i, k}=\frac{\exp(-\Vert \boldsymbol{x}_i-\boldsymbol{\mu}_k\Vert^2)}{\sum_{j=1}^K \exp(-\Vert \boldsymbol{x}_i-\boldsymbol{\mu}_j\Vert^2)}
r i , k = ∑ j = 1 K exp ( − ∥ x i − μ j ∥ 2 ) exp ( − ∥ x i − μ k ∥ 2 )
中心点更新公式不变。
第十二讲 隐变量模型
Latent Variable Model。
1、引入
在第三讲中我们提到,分类和回归这种有监督学习都可以看成是在学习某个条件概率分布p ( y ∣ x ; w ) p(y|\boldsymbol{x};\boldsymbol{w}) p ( y ∣ x ; w ) p ( x ; w ) p(\boldsymbol{x};\boldsymbol{w}) p ( x ; w )
由于没有标签y y y x \boldsymbol{x} x x \boldsymbol{x} x N ( μ , Σ ) \mathcal{N}(\boldsymbol{\mu}, \boldsymbol{\Sigma}) N ( μ , Σ )
设想引入一个简单的分类分布 p ( z ) p(\boldsymbol{z}) p ( z ) p ( z i ) = π i , i = 1 , 2 , ⋯ , K p(\boldsymbol{z}_i)=\boldsymbol{\pi}_i, i=1, 2, \cdots, K p ( z i ) = π i , i = 1 , 2 , ⋯ , K
p ( x ) = ∑ i = 1 K p ( x ∣ z i ) p ( z i ) = ∑ i = 1 K π i N ( x ∣ μ i , Σ i ) p(\boldsymbol{x})=\sum_{i=1}^K p(\boldsymbol{x}|\boldsymbol{z}_i)p(\boldsymbol{z}_i)=\sum_{i=1}^K \boldsymbol{\pi}_i\mathcal{N}(\boldsymbol{x}|\boldsymbol{\mu}_i, \boldsymbol{\Sigma}_i)
p ( x ) = i = 1 ∑ K p ( x ∣ z i ) p ( z i ) = i = 1 ∑ K π i N ( x ∣ μ i , Σ i )
则我们可以获得一个更复杂的分布:
这里的p ( z ) p(\boldsymbol{z}) p ( z ) 隐变量模型 是带有隐变量的概率模型:
p ( x , z ) p(\boldsymbol{x}, \boldsymbol{z})
p ( x , z )
其中z \boldsymbol{z} z 隐变量 。隐变量也可以有多个,如p ( x , z 1 , z 2 , ⋯ , z K ) p(\boldsymbol{x}, \boldsymbol{z}_1, \boldsymbol{z}_2, \cdots, \boldsymbol{z}_K) p ( x , z 1 , z 2 , ⋯ , z K )
相应的,关于x \boldsymbol{x} x p ( x ) p(\boldsymbol{x}) p ( x )
p ( x ) = ∫ z p ( x , z ) d z p(\boldsymbol{x})=\int_{\boldsymbol{z}} p(\boldsymbol{x}, \boldsymbol{z})d\boldsymbol{z}
p ( x ) = ∫ z p ( x , z ) d z
2、高斯隐变量模型
若隐变量的分布是一个高斯分布:
p ( z ) = N ( z ∣ 0 , I ) p(\boldsymbol{z})=\mathcal{N}(\boldsymbol{z}|\boldsymbol{0}, \boldsymbol{I})
p ( z ) = N ( z ∣ 0 , I )
引入参数W \boldsymbol{W} W p ( x ∣ z ) p(\boldsymbol{x}|\boldsymbol{z}) p ( x ∣ z )
p ( x ∣ z ) = N ( x ∣ W z + μ , σ 2 I ) p(\boldsymbol{x}|\boldsymbol{z})=\mathcal{N}(\boldsymbol{x}|\boldsymbol{W}\boldsymbol{z}+\boldsymbol{\mu}, \sigma^2 \boldsymbol{I})
p ( x ∣ z ) = N ( x ∣ W z + μ , σ 2 I )
我们可以通过最大化其(对数)似然概率:
log p ( x 1 , x 2 , ⋯ , x N ) = log ∏ i = 1 N p ( x i ) = ∑ i = 1 N log p ( x i ) \log p(\boldsymbol{x}_1, \boldsymbol{x}_2, \cdots, \boldsymbol{x}_N)= \log \prod_{i=1}^N p(\boldsymbol{x}_i)=\sum_{i=1}^N \log p(\boldsymbol{x}_i)
log p ( x 1 , x 2 , ⋯ , x N ) = log i = 1 ∏ N p ( x i ) = i = 1 ∑ N log p ( x i )
来得到能最好拟合真实数据的参数。
由p ( x ∣ z ) p(\boldsymbol{x}|\boldsymbol{z}) p ( x ∣ z )
x = μ + W z + ϵ \boldsymbol{x}=\boldsymbol{\mu}+\boldsymbol{Wz}+\boldsymbol{\epsilon}
x = μ + Wz + ϵ
其中ϵ ∼ N ( 0 , σ 2 I ) \boldsymbol{\epsilon}\sim \mathcal{N}(\boldsymbol{0}, \sigma^2 \boldsymbol{I}) ϵ ∼ N ( 0 , σ 2 I ) x \boldsymbol{x} x
E [ x ] = μ + W E [ z ] + E [ ϵ ] = μ E[\boldsymbol{x}]=\boldsymbol{\mu}+\boldsymbol{W}\mathbb{E}[\boldsymbol{z}]+\mathbb{E}[\boldsymbol{\epsilon}]=\boldsymbol{\mu}
E [ x ] = μ + W E [ z ] + E [ ϵ ] = μ
协方差为:
Cov [ x ] = E [ ( x − μ ) ( x − μ ) T ] = W W T + σ 2 I \text{Cov}[\boldsymbol{x}]=\mathbb{E}[(\boldsymbol{x}-\boldsymbol{\mu})(\boldsymbol{x}-\boldsymbol{\mu})^T]=\boldsymbol{W}\boldsymbol{W}^T+\sigma^2 \boldsymbol{I}
Cov [ x ] = E [( x − μ ) ( x − μ ) T ] = W W T + σ 2 I
所以有:
p ( x ) = N ( x ∣ μ , W W T + σ 2 I ) p(\boldsymbol{x})=\mathcal{N}(\boldsymbol{x}|\boldsymbol{\mu}, \boldsymbol{W}\boldsymbol{W}^T+\sigma^2 \boldsymbol{I})
p ( x ) = N ( x ∣ μ , W W T + σ 2 I )
回头看我们对数似然概率,可以写成:
∑ i = 1 N log N ( x i ∣ μ , W W T + σ 2 I ) = − 1 2 [ N D log 2 π + N log ∣ W W T + σ 2 I ∣ ] − 1 2 ∑ i = 1 N ( x i − μ ) T ( W W T + σ 2 I ) − 1 ( x i − μ ) \begin{split}
\sum_{i=1}^N \log \mathcal{N}(\boldsymbol{x}_i|\boldsymbol{\mu}, \boldsymbol{W}\boldsymbol{W}^T+\sigma^2 \boldsymbol{I})=-\frac 1 2\left[ND\log{2\pi}+N\log \vert \boldsymbol{W}\boldsymbol{W}^T+\sigma^2 \boldsymbol{I}\vert\right]-\\
\frac 1 2\sum_{i=1}^N(\boldsymbol{x}_i-\boldsymbol{\mu})^T(\boldsymbol{W}\boldsymbol{W}^T+\sigma^2 \boldsymbol{I})^{-1}(\boldsymbol{x}_i-\boldsymbol{\mu})
\end{split}
i = 1 ∑ N log N ( x i ∣ μ , W W T + σ 2 I ) = − 2 1 [ N D log 2 π + N log ∣ W W T + σ 2 I ∣ ] − 2 1 i = 1 ∑ N ( x i − μ ) T ( W W T + σ 2 I ) − 1 ( x i − μ )
记Σ = W W T + σ 2 I , S = ∑ i = 1 N ( x i − μ ) ( x i − μ ) T \boldsymbol{\Sigma}=\boldsymbol{W}\boldsymbol{W}^T+\sigma^2 \boldsymbol{I}, \boldsymbol{S}=\sum_{i=1}^N(\boldsymbol{x}_i-\boldsymbol{\mu})(\boldsymbol{x}_i-\boldsymbol{\mu})^T Σ = W W T + σ 2 I , S = ∑ i = 1 N ( x i − μ ) ( x i − μ ) T
∂ log p ( x 1 , x 2 , ⋯ , x N ) ∂ μ = 0 ⇒ μ = 1 N ∑ i = 1 N x i \frac{\partial\log p(\boldsymbol{x}_1, \boldsymbol{x}_2, \cdots, \boldsymbol{x}_N)}{\partial \boldsymbol{\mu}}=0 \Rightarrow \boldsymbol{\mu}=\frac 1 N \sum_{i=1}^N \boldsymbol{x}_i
∂ μ ∂ log p ( x 1 , x 2 , ⋯ , x N ) = 0 ⇒ μ = N 1 i = 1 ∑ N x i
∂ log p ( x 1 , x 2 , ⋯ , x N ) ∂ Σ = − N 2 ( Σ − 1 − Σ − 1 S Σ − 1 ) = 0 ⇒ Σ = S \frac{\partial\log p(\boldsymbol{x}_1, \boldsymbol{x}_2, \cdots, \boldsymbol{x}_N)}{\partial \boldsymbol{\Sigma}}=-\frac N 2 (\boldsymbol{\Sigma}^{-1}-\boldsymbol{\Sigma}^{-1}\boldsymbol{S}\boldsymbol{\Sigma}^{-1})=0 \Rightarrow \boldsymbol{\Sigma}=\boldsymbol{S}
∂ Σ ∂ log p ( x 1 , x 2 , ⋯ , x N ) = − 2 N ( Σ − 1 − Σ − 1 S Σ − 1 ) = 0 ⇒ Σ = S
综上,在最大化似然概率时,易知x ∼ N ( μ , Σ ) = N ( x ‾ , S ) \boldsymbol{x} \sim \mathcal{N}(\boldsymbol{\mu}, \boldsymbol{\Sigma})=\mathcal{N}(\overline{\boldsymbol{x}}, \boldsymbol{S}) x ∼ N ( μ , Σ ) = N ( x , S )
进一步可求出W = U Λ − σ 2 I \boldsymbol{W}=\boldsymbol{U}\sqrt{\Lambda-\sigma^2 \boldsymbol{I}} W = U Λ − σ 2 I
U \boldsymbol{U} U S \boldsymbol{S} S M M M Λ \Lambda Λ S \boldsymbol{S} S M M M
所以W \boldsymbol{W} W x \boldsymbol{x} x i i i λ i − σ 2 \sqrt{\lambda_i-\sigma^2} λ i − σ 2
所以高斯隐变量模型也被称为概率 PCA。
3、高斯混合模型
Gaussian Mixture Model,GMM 。
在高斯混合模型中,我们假设数据是由多个高斯分布混合而成的:
p ( x ) = ∑ i = 1 K π i N ( x ∣ μ i , Σ i ) p(\boldsymbol{x})=\sum_{i=1}^K \pi_i\mathcal{N}(\boldsymbol{x}|\boldsymbol{\mu}_i, \boldsymbol{\Sigma}_i)
p ( x ) = i = 1 ∑ K π i N ( x ∣ μ i , Σ i )
其中π i \pi_i π i ∑ i = 1 K π i = 1 \sum_{i=1}^K \pi_i=1 ∑ i = 1 K π i = 1
高斯混合模型可以写作隐变量模型的形式。引入隐变量z \boldsymbol{z} z z \boldsymbol{z} z z i \boldsymbol{z}_i z i i i i
隐变量的分布写为p ( z ) p(\boldsymbol{z}) p ( z ) p ( z i ) = π i p(\boldsymbol{z}_i)=\pi_i p ( z i ) = π i p ( x ∣ z ) p(\boldsymbol{x}|\boldsymbol{z}) p ( x ∣ z ) p ( x ∣ z i ) = N ( x ∣ μ i , Σ i ) p(\boldsymbol{x}|\boldsymbol{z}_i)=\mathcal{N}(\boldsymbol{x}|\boldsymbol{\mu}_i, \boldsymbol{\Sigma}_i) p ( x ∣ z i ) = N ( x ∣ μ i , Σ i )
通过最大化似然概率,可以得到最优参数μ i , Σ i , π i \boldsymbol{\mu}_i, \boldsymbol{\Sigma}_i, \pi_i μ i , Σ i , π i
有了x \boldsymbol{x} x
p ( z i ∣ x ) = p ( x ∣ z i ) p ( z i ) p ( x ) = π i N ( x ∣ μ i , Σ i ) ∑ j = 1 K π j N ( x ∣ μ j , Σ j ) p(\boldsymbol{z}_i|\boldsymbol{x})=\frac{p(\boldsymbol{x}|\boldsymbol{z}_i)p(\boldsymbol{z}_i)}{p(\boldsymbol{x})}=\frac{\pi_i\mathcal{N}(\boldsymbol{x}|\boldsymbol{\mu}_i, \boldsymbol{\Sigma}_i)}{\sum_{j=1}^K \pi_j\mathcal{N}(\boldsymbol{x}|\boldsymbol{\mu}_j, \boldsymbol{\Sigma}_j)}
p ( z i ∣ x ) = p ( x ) p ( x ∣ z i ) p ( z i ) = ∑ j = 1 K π j N ( x ∣ μ j , Σ j ) π i N ( x ∣ μ i , Σ i )
这个后验概率的含义就是,数据点x \boldsymbol{x} x i i i
LVM 还运用在隐式马尔科夫模型、Sigmoid 信念网络(SBN)、隐式狄利克雷分布(LDA)等模型中。
第十三讲 EM 算法
Expectation Maximization Algorithm,期望最大化算法 。
EM 算法是用于解决下面的问题:假如有联合分布p ( x , z ; θ ) p(\boldsymbol{x}, \boldsymbol{z}; \boldsymbol{\theta}) p ( x , z ; θ ) p ( x ; θ ) p(\boldsymbol{x}; \boldsymbol{\theta}) p ( x ; θ )
θ ∗ = arg max θ log p ( x ; θ ) \boldsymbol{\theta}^*=\arg\max_{\boldsymbol{\theta}} \log p(\boldsymbol{x}; \boldsymbol{\theta})
θ ∗ = arg θ max log p ( x ; θ )
EM 算法是一种迭代算法,每次迭代分两步:
E-step:计算下面这个期望:Q ( θ ; θ ( t ) ) = E z ∼ p ( z ∣ x ; θ ( t ) ) [ log p ( x , z ; θ ) ] Q(\boldsymbol{\theta};\boldsymbol{\theta}^{(t)})=\mathbb{E}_{\boldsymbol{z}\sim p(\boldsymbol{z}|\boldsymbol{x}; \boldsymbol{\theta}^{(t)})}[\log p(\boldsymbol{x}, \boldsymbol{z}; \boldsymbol{\theta})]
Q ( θ ; θ ( t ) ) = E z ∼ p ( z ∣ x ; θ ( t ) ) [ log p ( x , z ; θ )]
这实际上是在给定数据x \boldsymbol{x} x θ ( t ) \boldsymbol{\theta}^{(t)} θ ( t ) z \boldsymbol{z} z
M-step:更新参数使这个期望最大化:θ ( t + 1 ) = arg max θ Q ( θ ; θ ( t ) ) \boldsymbol{\theta}^{(t+1)}=\arg\max_{\boldsymbol{\theta}} Q(\boldsymbol{\theta};\boldsymbol{\theta}^{(t)})
θ ( t + 1 ) = arg θ max Q ( θ ; θ ( t ) )
1、理论推导
将对数似然概率重写。假定q ( z ) q(\boldsymbol{z}) q ( z ) ∑ z q ( z ) = 1 \sum_{\boldsymbol{z}} q(\boldsymbol{z})=1 ∑ z q ( z ) = 1
log p ( x ; θ ) = ∑ z q ( z ) log p ( x ; θ ) = ∑ z q ( z ) log p ( x , z ; θ ) p ( z ∣ x ; θ ) = ∑ z q ( z ) log p ( x , z ; θ ) q ( z ) + ∑ z q ( z ) log q ( z ) p ( z ∣ x ; θ ) = L ( q , θ ) + KL ( q ∥ p ( z ∣ x ; θ ) ) \begin{align*}
\log p(\boldsymbol{x}; \boldsymbol{\theta})&=\sum_{\boldsymbol{z}} q(\boldsymbol{z})\log p(\boldsymbol{x}; \boldsymbol{\theta})=\sum_{\boldsymbol{z}} q(\boldsymbol{z})\log \frac{p(\boldsymbol{x}, \boldsymbol{z}; \boldsymbol{\theta})}{p(\boldsymbol{z}|\boldsymbol{x}; \boldsymbol{\theta})}\\
&=\sum_{\boldsymbol{z}} q(\boldsymbol{z})\log \frac{p(\boldsymbol{x}, \boldsymbol{z}; \boldsymbol{\theta})}{q(\boldsymbol{z})}+\sum_{\boldsymbol{z}} q(\boldsymbol{z})\log \frac{q(\boldsymbol{z})}{p(\boldsymbol{z}|\boldsymbol{x}; \boldsymbol{\theta})}\\
&=\mathcal{L}(q, \boldsymbol{\theta})+\text{KL}(q\Vert p(\boldsymbol{z}|\boldsymbol{x}; \boldsymbol{\theta}))
\end{align*}
log p ( x ; θ ) = z ∑ q ( z ) log p ( x ; θ ) = z ∑ q ( z ) log p ( z ∣ x ; θ ) p ( x , z ; θ ) = z ∑ q ( z ) log q ( z ) p ( x , z ; θ ) + z ∑ q ( z ) log p ( z ∣ x ; θ ) q ( z ) = L ( q , θ ) + KL ( q ∥ p ( z ∣ x ; θ ))
前一项我们称之为变分下界 ,它是对数似然概率的一个下界。通过最大化这个下界可以间接最大化对数似然概率。
后一项我们称之为KL 散度 ,它用于衡量两个分布的相似程度。实际上我们这里就是在用任意一个分布q ( z ) q(\boldsymbol{z}) q ( z ) p ( z ∣ x ; θ ) p(\boldsymbol{z}|\boldsymbol{x}; \boldsymbol{\theta}) p ( z ∣ x ; θ )
KL 散度一般的定义为:
KL ( q ∥ p ) = ∫ q ( z ) log q ( z ) p ( z ) d z ⩾ 0 \text{KL}(q\Vert p)=\int q(\boldsymbol{z})\log \frac{q(\boldsymbol{z})}{p(\boldsymbol{z})} d\boldsymbol{z}\geqslant 0
KL ( q ∥ p ) = ∫ q ( z ) log p ( z ) q ( z ) d z ⩾ 0
下面这张图可以直观地解释 KL 散度:
若取q ( z ) = p ( z ∣ x ; θ ( t ) ) q(\boldsymbol{z})=p(\boldsymbol{z}|\boldsymbol{x}; \boldsymbol{\theta}^{(t)}) q ( z ) = p ( z ∣ x ; θ ( t ) ) θ ( t ) \boldsymbol{\theta}^{(t)} θ ( t )
log p ( x ; θ ( t ) ) = L ( p ( z ∣ x ; θ ( t ) ) , θ ( t ) ) = ∑ z p ( z ∣ x ; θ ( t ) ) log p ( x , z ; θ ( t ) ) p ( z ∣ x ; θ ( t ) ) \log p(\boldsymbol{x}; \boldsymbol{\theta}^{(t)})=\mathcal{L}(p(\boldsymbol{z}|\boldsymbol{x}; \boldsymbol{\theta}^{(t)}), \boldsymbol{\theta}^{(t)})=\sum_{\boldsymbol{z}} p(\boldsymbol{z}|\boldsymbol{x}; \boldsymbol{\theta}^{(t)})\log \frac{p(\boldsymbol{x}, \boldsymbol{z}; \boldsymbol{\theta}^{(t)})}{p(\boldsymbol{z}|\boldsymbol{x}; \boldsymbol{\theta}^{(t)})}
log p ( x ; θ ( t ) ) = L ( p ( z ∣ x ; θ ( t ) ) , θ ( t ) ) = z ∑ p ( z ∣ x ; θ ( t ) ) log p ( z ∣ x ; θ ( t ) ) p ( x , z ; θ ( t ) )
KL 散度恰好为 0,直接舍去。如果我们更新参数:
θ ( t + 1 ) = arg max θ L ( p ( z ∣ x ; θ ( t ) ) , θ ) \boldsymbol{\theta}^{(t+1)}=\arg\max_{\boldsymbol{\theta}} \mathcal{L}(p(\boldsymbol{z}|\boldsymbol{x}; \boldsymbol{\theta}^{(t)}), \boldsymbol{\theta})
θ ( t + 1 ) = arg θ max L ( p ( z ∣ x ; θ ( t ) ) , θ )
则一定有:
L ( p ( z ∣ x ; θ ( t ) ) , θ ( t + 1 ) ) ⩾ L ( p ( z ∣ x ; θ ( t ) ) , θ ( t ) ) = log p ( x ; θ ( t ) ) \mathcal{L}(p(\boldsymbol{z}|\boldsymbol{x}; \boldsymbol{\theta}^{(t)}), \boldsymbol{\theta}^{(t+1)})\geqslant \mathcal{L}(p(\boldsymbol{z}|\boldsymbol{x}; \boldsymbol{\theta}^{(t)}), \boldsymbol{\theta}^{(t)})=\log p(\boldsymbol{x}; \boldsymbol{\theta}^{(t)})
L ( p ( z ∣ x ; θ ( t ) ) , θ ( t + 1 ) ) ⩾ L ( p ( z ∣ x ; θ ( t ) ) , θ ( t ) ) = log p ( x ; θ ( t ) )
我们再看参数为θ ( t + 1 ) \boldsymbol{\theta}^{(t+1)} θ ( t + 1 )
log p ( x ; θ ( t + 1 ) ) = L ( p ( z ∣ x ; θ ( t ) ) , θ ( t + 1 ) ) + KL ( p ( z ∣ x ; θ ( t ) ) ∥ p ( z ∣ x ; θ ( t + 1 ) ) ) ⩾ log p ( x ; θ ( t ) ) + 0 \log p(\boldsymbol{x}; \boldsymbol{\theta}^{(t+1)})=\mathcal{L}(p(\boldsymbol{z}|\boldsymbol{x}; \boldsymbol{\theta}^{(t)}), \boldsymbol{\theta}^{(t+1)})+\text{KL}(p(\boldsymbol{z}|\boldsymbol{x}; \boldsymbol{\theta}^{(t)})\Vert p(\boldsymbol{z}|\boldsymbol{x}; \boldsymbol{\theta}^{(t+1)}))\geqslant \log p(\boldsymbol{x}; \boldsymbol{\theta}^{(t)}) +0
log p ( x ; θ ( t + 1 ) ) = L ( p ( z ∣ x ; θ ( t ) ) , θ ( t + 1 ) ) + KL ( p ( z ∣ x ; θ ( t ) ) ∥ p ( z ∣ x ; θ ( t + 1 ) )) ⩾ log p ( x ; θ ( t ) ) + 0
所以按照上面更新参数的方法,总有:
log p ( x ; θ ( t + 1 ) ) ⩾ log p ( x ; θ ( t ) ) \log p(\boldsymbol{x}; \boldsymbol{\theta}^{(t+1)})\geqslant \log p(\boldsymbol{x}; \boldsymbol{\theta}^{(t)})
log p ( x ; θ ( t + 1 ) ) ⩾ log p ( x ; θ ( t ) )
接下来,只需证明 EM 算法和上述过程等价。因为:
L ( q , θ ) = ∑ z q ( z ) log p ( x , z ; θ ) q ( z ) = ∑ z q ( z ) log p ( x , z ; θ ) − ∑ z q ( z ) log q ( z ) \mathcal{L}(q, \boldsymbol{\theta})=\sum_{\boldsymbol{z}} q(\boldsymbol{z})\log \frac{p(\boldsymbol{x}, \boldsymbol{z}; \boldsymbol{\theta})}{q(\boldsymbol{z})}=\sum_{\boldsymbol{z}} q(\boldsymbol{z})\log p(\boldsymbol{x}, \boldsymbol{z}; \boldsymbol{\theta})-\sum_{\boldsymbol{z}} q(\boldsymbol{z})\log q(\boldsymbol{z})
L ( q , θ ) = z ∑ q ( z ) log q ( z ) p ( x , z ; θ ) = z ∑ q ( z ) log p ( x , z ; θ ) − z ∑ q ( z ) log q ( z )
后半部分其实就是q ( z ) q(\boldsymbol{z}) q ( z )
2、训练 GMM
GMM 可以利用 EM 算法来训练。
首先是 E-step。由于:
p ( z j ∣ x i ; θ ( t ) ) = N ( x i ∣ μ j ( t ) , Σ j ( t ) ) π j ( t ) ∑ k = 1 K N ( x i ∣ μ k ( t ) , Σ k ( t ) ) π k ( t ) = γ i , j ( t ) p(\boldsymbol{z}_j|\boldsymbol{x}_i; \boldsymbol{\theta}^{(t)})=\frac{\mathcal{N}(\boldsymbol{x}_i|\boldsymbol{\mu}^{(t)}_j, \boldsymbol{\Sigma}^{(t)}_j)\pi^{(t)}_j}{\sum_{k=1}^K \mathcal{N}(\boldsymbol{x}_i|\boldsymbol{\mu}^{(t)}_k, \boldsymbol{\Sigma}^{(t)}_k)\pi^{(t)}_k}=\gamma^{(t)}_{i, j}
p ( z j ∣ x i ; θ ( t ) ) = ∑ k = 1 K N ( x i ∣ μ k ( t ) , Σ k ( t ) ) π k ( t ) N ( x i ∣ μ j ( t ) , Σ j ( t ) ) π j ( t ) = γ i , j ( t )
所以:
log p ( x i , z ; θ ( t ) ) = ∑ j = 1 K [ log N ( x i ∣ μ j ( t ) , Σ j ( t ) ) + log π j ( t ) ] \log p(\boldsymbol{x}_i, \boldsymbol{z}; \boldsymbol{\theta}^{(t)})=\sum_{j=1}^K [\log \mathcal{N}(\boldsymbol{x}_i|\boldsymbol{\mu}^{(t)}_j, \boldsymbol{\Sigma}^{(t)}_j)+\log \pi^{(t)}_j]
log p ( x i , z ; θ ( t ) ) = j = 1 ∑ K [ log N ( x i ∣ μ j ( t ) , Σ j ( t ) ) + log π j ( t ) ]
所以对于单个数据点x i \boldsymbol{x}_i x i
Q ( θ ; θ ( t ) ) = ∑ j = 1 K γ i , j ( t ) [ log N ( x i ∣ μ j , Σ j ) + log π j ] Q(\boldsymbol{\theta}; \boldsymbol{\theta}^{(t)})=\sum_{j=1}^K \gamma_{i, j}^{(t)}[\log \mathcal{N}(\boldsymbol{x}_i|\boldsymbol{\mu}_j, \boldsymbol{\Sigma}_j)+\log \pi_j]
Q ( θ ; θ ( t ) ) = j = 1 ∑ K γ i , j ( t ) [ log N ( x i ∣ μ j , Σ j ) + log π j ]
将高斯分布也展开:
Q ( θ ; θ ( t ) ) = ∑ j = 1 K γ i , j ( t ) [ − 1 2 log ∣ Σ j ∣ − 1 2 ( x i − μ j ) T Σ j − 1 ( x i − μ j ) + log π j ] Q(\boldsymbol{\theta}; \boldsymbol{\theta}^{(t)})=\sum_{j=1}^K \gamma_{i, j}^{(t)}\left[-\frac 1 2 \log \vert \boldsymbol{\Sigma}_j\vert-\frac 1 2 (\boldsymbol{x}_i-\boldsymbol{\mu}_j)^T\boldsymbol{\Sigma}_j^{-1}(\boldsymbol{x}_i-\boldsymbol{\mu}_j)+\log \pi_j\right]
Q ( θ ; θ ( t ) ) = j = 1 ∑ K γ i , j ( t ) [ − 2 1 log ∣ Σ j ∣ − 2 1 ( x i − μ j ) T Σ j − 1 ( x i − μ j ) + log π j ]
考虑所有数据,平均期望就是:
Q ( θ ; θ ( t ) ) = 1 N ∑ i = 1 N ∑ j = 1 K γ i , j ( t ) [ − 1 2 log ∣ Σ j ∣ − 1 2 ( x i − μ j ) T Σ j − 1 ( x i − μ j ) + log π j ] + C Q(\boldsymbol{\theta}; \boldsymbol{\theta}^{(t)})=\frac 1 N\sum_{i=1}^N \sum_{j=1}^K \gamma_{i, j}^{(t)}\left[-\frac 1 2 \log \vert \boldsymbol{\Sigma}_j\vert-\frac 1 2 (\boldsymbol{x}_i-\boldsymbol{\mu}_j)^T\boldsymbol{\Sigma}_j^{-1}(\boldsymbol{x}_i-\boldsymbol{\mu}_j)+\log \pi_j\right]+C
Q ( θ ; θ ( t ) ) = N 1 i = 1 ∑ N j = 1 ∑ K γ i , j ( t ) [ − 2 1 log ∣ Σ j ∣ − 2 1 ( x i − μ j ) T Σ j − 1 ( x i − μ j ) + log π j ] + C
接下来是 M-step。上面已经求出了期望的式子,分别对μ j , Σ j \boldsymbol{\mu}_j, \boldsymbol{\Sigma}_j μ j , Σ j
μ j ( t + 1 ) = 1 N j ∑ i = 1 N γ i , j ( t ) x i Σ j ( t + 1 ) = 1 N j ∑ i = 1 N γ i , j ( t ) ( x i − μ j ( t + 1 ) ) ( x i − μ j ( t + 1 ) ) T \begin{align*}
&\boldsymbol{\mu}_j^{(t+1)}=\frac{1}{N_j} \sum_{i=1}^N \gamma_{i, j}^{(t)}\boldsymbol{x}_i\\
&\boldsymbol{\Sigma}_j^{(t+1)}=\frac{1}{N_j} \sum_{i=1}^N \gamma_{i, j}^{(t)}(\boldsymbol{x}_i-\boldsymbol{\mu}_j^{(t+1)})(\boldsymbol{x}_i-\boldsymbol{\mu}_j^{(t+1)})^T
\end{align*}
μ j ( t + 1 ) = N j 1 i = 1 ∑ N γ i , j ( t ) x i Σ j ( t + 1 ) = N j 1 i = 1 ∑ N γ i , j ( t ) ( x i − μ j ( t + 1 ) ) ( x i − μ j ( t + 1 ) ) T
其中N j = ∑ i = 1 N γ i , j ( t ) N_j=\sum_{i=1}^N \gamma_{i, j}^{(t)} N j = ∑ i = 1 N γ i , j ( t ) j j j π j \pi_j π j ∑ j = 1 K π j = 1 \sum_{j=1}^K \pi_j=1 ∑ j = 1 K π j = 1
π j ( t + 1 ) = N j N \pi_j^{(t+1)}=\frac{N_j}{N}
π j ( t + 1 ) = N N j
总结一下,如果第t t t μ ( t ) , Σ ( t ) , π ( t ) \boldsymbol{\mu}^{(t)}, \boldsymbol{\Sigma}^{(t)}, \pi^{(t)} μ ( t ) , Σ ( t ) , π ( t ) γ i , j ( t ) \gamma_{i, j}^{(t)} γ i , j ( t ) μ ( t + 1 ) , Σ ( t + 1 ) , π ( t + 1 ) \boldsymbol{\mu}^{(t+1)}, \boldsymbol{\Sigma}^{(t+1)}, \pi^{(t+1)} μ ( t + 1 ) , Σ ( t + 1 ) , π ( t + 1 )
如果将Σ k \boldsymbol{\Sigma}_k Σ k σ 2 I \sigma^2 I σ 2 I π k = 1 K \pi_k=\frac 1 K π k = K 1 β = 1 2 σ 2 \beta=\frac {1}{2\sigma^2} β = 2 σ 2 1
3、EM 变体
上面我们讨论了 EM 在训练 GMM 中的应用,实际问题中的后验分布不总是高斯分布,期望和参数更新都不一定有闭式解。
3.1、EM+SGD
推导 EM 算法的过程中,我们发现最大化期望,只是在保证似然概率不减。事实上,保证似然概率不减,不一定要最大化期望。
对期望利用梯度上升法来更新参数:
θ ( t + 1 ) = θ ( t ) + η ∇ θ Q ( θ ; θ ( t ) ) \boldsymbol{\theta}^{(t+1)}=\boldsymbol{\theta}^{(t)}+\eta \nabla_{\boldsymbol{\theta}} Q(\boldsymbol{\theta}; \boldsymbol{\theta}^{(t)})
θ ( t + 1 ) = θ ( t ) + η ∇ θ Q ( θ ; θ ( t ) )
显然有:
Q ( θ ( t + 1 ) ; θ ( t ) ) ⩾ Q ( θ ( t ) ; θ ( t ) ) Q(\boldsymbol{\theta}^{(t+1)}; \boldsymbol{\theta}^{(t)})\geqslant Q(\boldsymbol{\theta}^{(t)}; \boldsymbol{\theta}^{(t)})
Q ( θ ( t + 1 ) ; θ ( t ) ) ⩾ Q ( θ ( t ) ; θ ( t ) )
由于p ( z ) p(\boldsymbol{z}) p ( z )
log p ( x ; θ ( t + 1 ) ) ⩾ log p ( x ; θ ( t ) ) \log p(\boldsymbol{x}; \boldsymbol{\theta}^{(t+1)})\geqslant \log p(\boldsymbol{x}; \boldsymbol{\theta}^{(t)})
log p ( x ; θ ( t + 1 ) ) ⩾ log p ( x ; θ ( t ) )
3.2、MCMC EM
Markov Chain Monte Carlo EM。
其中 MCMC 是一种采样方法,由于我们并不总是知道后验分布的形式,所以可以通过 MCMC 来近似采样。
所以期望可以用这些采样值来近似:
Q ( θ ; θ ( t ) ) ≈ 1 S ∑ s = 1 S log p ( x , z s ; θ ) Q(\boldsymbol{\theta}; \boldsymbol{\theta}^{(t)})\approx \frac 1 S \sum_{s=1}^S \log p(\boldsymbol{x}, \boldsymbol{z}_s; \boldsymbol{\theta})
Q ( θ ; θ ( t ) ) ≈ S 1 s = 1 ∑ S log p ( x , z s ; θ )
再结合 SGD,就得到了 MCMC EM,这是常用于训练隐变量模型的方法。
3.3、VB EM
Variational Bayes EM,变分贝叶斯 EM。
直接在高维空间中采样出z s \boldsymbol{z}_s z s q ( z ; ϕ ) q(\boldsymbol{z}; \boldsymbol{\phi}) q ( z ; ϕ ) p ( z ∣ x ; θ ) p(\boldsymbol{z}|\boldsymbol{x}; \boldsymbol{\theta}) p ( z ∣ x ; θ )
这个简单的分布,可以是每个维度用一个高斯分布的组合:
z i ∼ N ( μ i , σ i 2 ) z_i\sim \mathcal{N}(\mu_i, \sigma_i^2)
z i ∼ N ( μ i , σ i 2 )
然后找到能最小化与原后验分布 KL 散度的参数ϕ \boldsymbol{\phi} ϕ
将最小化 KL 散度进行转化:
min ϕ KL ( q ( z ; ϕ ) ∥ p ( z ∣ x ; θ ) ) ⇔ max ϕ ∫ q ( z ; ϕ ) log p ( z ∣ x ; θ ) q ( z ; ϕ ) d z ⇔ max ϕ ∫ q ( z ; ϕ ) log p ( x , z ; θ ) p ( z ; ϕ ) d z \min_{\boldsymbol{\phi}} \text{KL}(q(\boldsymbol{z}; \boldsymbol{\phi})\Vert p(\boldsymbol{z}|\boldsymbol{x}; \boldsymbol{\theta})) \Leftrightarrow \max_{\boldsymbol{\phi}} \int q(\boldsymbol{z}; \boldsymbol{\phi})\log \frac{p(\boldsymbol{z}|\boldsymbol{x}; \boldsymbol{\theta})}{q(\boldsymbol{z}; \boldsymbol{\phi})}d\boldsymbol{z} \Leftrightarrow \max_{\boldsymbol{\phi}} \int q(\boldsymbol{z}; \boldsymbol{\phi})\log \frac{p(\boldsymbol{x}, \boldsymbol{z}; \boldsymbol{\theta})}{p(\boldsymbol{z}; \boldsymbol{\phi})}d\boldsymbol{z}
ϕ min KL ( q ( z ; ϕ ) ∥ p ( z ∣ x ; θ )) ⇔ ϕ max ∫ q ( z ; ϕ ) log q ( z ; ϕ ) p ( z ∣ x ; θ ) d z ⇔ ϕ max ∫ q ( z ; ϕ ) log p ( z ; ϕ ) p ( x , z ; θ ) d z
中间,我们舍去了log p ( x ; θ ) \log p(\boldsymbol{x}; \boldsymbol{\theta}) log p ( x ; θ ) ϕ \boldsymbol{\phi} ϕ
后续利用这个近似分布最大化梯度可以写为:
max θ E q ( z ; ϕ ) [ log p ( x , z ; θ ) ] = max θ ∫ q ( z ; ϕ ) log p ( x , z ; θ ) d z ⇔ max θ ∫ q ( z ; ϕ ) log p ( x , z ; θ ) q ( z ; ϕ ) d z \max_{\boldsymbol{\theta}} \mathbb{E}_{q(\boldsymbol{z}; \boldsymbol{\phi})}[\log p(\boldsymbol{x}, \boldsymbol{z}; \boldsymbol{\theta})]= \max_{\boldsymbol{\theta}} \int q(\boldsymbol{z}; \boldsymbol{\phi})\log p(\boldsymbol{x}, \boldsymbol{z}; \boldsymbol{\theta})d\boldsymbol{z}\Leftrightarrow \max_{\boldsymbol{\theta}} \int q(\boldsymbol{z}; \boldsymbol{\phi})\log\frac{p(\boldsymbol{x}, \boldsymbol{z}; \boldsymbol{\theta})}{q(\boldsymbol{z}; \boldsymbol{\phi})}d\boldsymbol{z}
θ max E q ( z ; ϕ ) [ log p ( x , z ; θ )] = θ max ∫ q ( z ; ϕ ) log p ( x , z ; θ ) d z ⇔ θ max ∫ q ( z ; ϕ ) log q ( z ; ϕ ) p ( x , z ; θ ) d z
这里添加了与θ \boldsymbol{\theta} θ log p ( x ; θ ) \log p(\boldsymbol{x}; \boldsymbol{\theta}) log p ( x ; θ )
可以发现最小化散度和最大化期望可以转化为相同的形式。所以以上两个问题统一写为:
max θ , ϕ ∫ q ( z ; ϕ ) log p ( x , z ; θ ) q ( z ; ϕ ) d z = max θ , ϕ ∫ L ( x ; θ , ϕ ) d z \max_{\boldsymbol{\theta}, \boldsymbol{\phi}} \int q(\boldsymbol{z}; \boldsymbol{\phi})\log\frac{p(\boldsymbol{x}, \boldsymbol{z}; \boldsymbol{\theta})}{q(\boldsymbol{z}; \boldsymbol{\phi})}d\boldsymbol{z}=\max_{\boldsymbol{\theta}, \boldsymbol{\phi}} \int \mathcal{L}(\boldsymbol{x};\boldsymbol{\theta}, \boldsymbol{\phi})d\boldsymbol{z}
θ , ϕ max ∫ q ( z ; ϕ ) log q ( z ; ϕ ) p ( x , z ; θ ) d z = θ , ϕ max ∫ L ( x ; θ , ϕ ) d z
利用梯度下降法,同时 更新θ , ϕ \boldsymbol{\theta}, \boldsymbol{\phi} θ , ϕ
可以证明,L ( x ; θ , ϕ ) \mathcal{L}(\boldsymbol{x};\boldsymbol{\theta}, \boldsymbol{\phi}) L ( x ; θ , ϕ )
第十四讲 深度生成模型
数据的生成过程可以用一个联合概率分布函数来描述:
p ( x , z ) = p ( x ∣ z ) p ( z ) p(\boldsymbol{x}, \boldsymbol{z})=p(\boldsymbol{x}|\boldsymbol{z})p(\boldsymbol{z})
p ( x , z ) = p ( x ∣ z ) p ( z )
也即由隐变量z \boldsymbol{z} z x \boldsymbol{x} x 生成模型(GM) 。
之前介绍的 PCA 是隐变量模型:
p ( z ) = N ( z ∣ 0 , I ) p ( x ∣ z ) = N ( x ∣ W z + μ , σ 2 I ) \begin{align*}
&p(\boldsymbol{z})=\mathcal{N}(\boldsymbol{z}|\boldsymbol{0}, \boldsymbol{I})\\
&p(\boldsymbol{x}|\boldsymbol{z})=\mathcal{N}(\boldsymbol{x}|\boldsymbol{W}\boldsymbol{z}+\boldsymbol{\mu}, \sigma^2 \boldsymbol{I})
\end{align*}
p ( z ) = N ( z ∣ 0 , I ) p ( x ∣ z ) = N ( x ∣ W z + μ , σ 2 I )
GMM 也是隐变量模型:
p ( z i ) = π i p ( x ∣ z i ) = N ( x ∣ μ i , Σ i ) \begin{align*}
&p(\boldsymbol{z}_i)=\pi_i\\
&p(\boldsymbol{x}|\boldsymbol{z}_i)=\mathcal{N}(\boldsymbol{x}|\boldsymbol{\mu}_i, \boldsymbol{\Sigma}_i)
\end{align*}
p ( z i ) = π i p ( x ∣ z i ) = N ( x ∣ μ i , Σ i )
为了增强模型的表达能力,我们在p ( z ) p(\boldsymbol{z}) p ( z ) p ( x ∣ z ) p(\boldsymbol{x}|\boldsymbol{z}) p ( x ∣ z )
p ( x , z ) = p ( x ∣ T ( z ) ) p ( z ) p(\boldsymbol{x}, \boldsymbol{z})=p(\boldsymbol{x}|T(\boldsymbol{z}))p(\boldsymbol{z})
p ( x , z ) = p ( x ∣ T ( z )) p ( z )
其中T ( ⋅ ) T(\cdot) T ( ⋅ ) 深度生成模型(DGM) 。
例如在生成图片的时候,DGM 可以具体的写为:
p ( x , z ) = N ( x ∣ μ ( z ) , I ) N ( z ∣ 0 , I ) p(\boldsymbol{x}, \boldsymbol{z})=\mathcal{N}(\boldsymbol{x}|\boldsymbol{\mu}(\boldsymbol{z}), \boldsymbol{I})\mathcal{N}(\boldsymbol{z}|\boldsymbol{0}, \boldsymbol{I})
p ( x , z ) = N ( x ∣ μ ( z ) , I ) N ( z ∣ 0 , I )
其中μ ( z ) \boldsymbol{\mu}(\boldsymbol{z}) μ ( z )
则有:
μ ( z ) = W 3 a ( W 2 a ( W 1 z + b 1 ) + b 2 ) + b 3 \boldsymbol{\mu}(\boldsymbol{z})=\boldsymbol{W}_3a(\boldsymbol{W}_2a(\boldsymbol{W}_1\boldsymbol{z}+\boldsymbol{b}_1)+\boldsymbol{b}_2)+\boldsymbol{b}_3
μ ( z ) = W 3 a ( W 2 a ( W 1 z + b 1 ) + b 2 ) + b 3
在 PCA 中,则有:
μ ( z ) = W z + b \boldsymbol{\mu}(\boldsymbol{z})=\boldsymbol{W}\boldsymbol{z}+\boldsymbol{b}
μ ( z ) = W z + b
后续,将神经网络涉及的参数简记一个符号θ \boldsymbol{\theta} θ μ ( z ) \boldsymbol{\mu}(\boldsymbol{z}) μ ( z ) μ ( z ; θ ) \boldsymbol{\mu}(\boldsymbol{z}; \boldsymbol{\theta}) μ ( z ; θ )
1、VB EM 训练 DGM
我们知道 VB EM 的基本思想是用一个简单的分布q ( z ; ϕ ) q(\boldsymbol{z}; \boldsymbol{\phi}) q ( z ; ϕ ) p ( z ∣ x ; θ ) p(\boldsymbol{z}|\boldsymbol{x}; \boldsymbol{\theta}) p ( z ∣ x ; θ )
优化这个近似的分布和 E-step 中的期望可以统一的写为最大化下面这个式子:
L ( x ; θ , ϕ ) = ∫ q ( z ; ϕ ) log p ( x , z ; θ ) q ( z ; ϕ ) d z \mathcal{L}(\boldsymbol{x};\boldsymbol{\theta}, \boldsymbol{\phi})=\int q(\boldsymbol{z}; \boldsymbol{\phi})\log\frac{p(\boldsymbol{x}, \boldsymbol{z}; \boldsymbol{\theta})}{q(\boldsymbol{z}; \boldsymbol{\phi})}d\boldsymbol{z}
L ( x ; θ , ϕ ) = ∫ q ( z ; ϕ ) log q ( z ; ϕ ) p ( x , z ; θ ) d z
进一步,由p ( x , z ; θ ) = p ( x ∣ z ; θ ) p ( z ) p(\boldsymbol{x}, \boldsymbol{z}; \boldsymbol{\theta})=p(\boldsymbol{x}|\boldsymbol{z}; \boldsymbol{\theta})p(\boldsymbol{z}) p ( x , z ; θ ) = p ( x ∣ z ; θ ) p ( z )
L ( x ; θ , ϕ ) = ∫ q ( z ; ϕ ) log p ( x ∣ z ; θ ) d z − ∫ q ( z ; ϕ ) log q ( z ; ϕ ) p ( z ) d z = E q ( z ; ϕ ) [ log p ( x ∣ z ; θ ) ] − KL ( q ( z ; ϕ ) ∥ p ( z ) ) \begin{align*}
\mathcal{L}(\boldsymbol{x};\boldsymbol{\theta}, \boldsymbol{\phi})&=\int q(\boldsymbol{z}; \boldsymbol{\phi})\log p(\boldsymbol{x}|\boldsymbol{z}; \boldsymbol{\theta})d\boldsymbol{z}-\int q(\boldsymbol{z}; \boldsymbol{\phi})\log \frac{q(\boldsymbol{z}; \boldsymbol{\phi})}{p(\boldsymbol{z})}d\boldsymbol{z}\\
&=\mathbb{E}_{q(\boldsymbol{z}; \boldsymbol{\phi})}[\log p(\boldsymbol{x}|\boldsymbol{z}; \boldsymbol{\theta})]-\text{KL}(q(\boldsymbol{z}; \boldsymbol{\phi})\Vert p(\boldsymbol{z}))
\end{align*}
L ( x ; θ , ϕ ) = ∫ q ( z ; ϕ ) log p ( x ∣ z ; θ ) d z − ∫ q ( z ; ϕ ) log p ( z ) q ( z ; ϕ ) d z = E q ( z ; ϕ ) [ log p ( x ∣ z ; θ )] − KL ( q ( z ; ϕ ) ∥ p ( z ))
接下来,考虑一个具体的例子:p ( x ∣ z ; θ ) = N ( x ∣ μ ( z ; θ ) , I ) p(\boldsymbol{x}|\boldsymbol{z}; \boldsymbol{\theta})=\mathcal{N}(\boldsymbol{x}|\boldsymbol{\mu}(\boldsymbol{z}; \boldsymbol{\theta}), \boldsymbol{I}) p ( x ∣ z ; θ ) = N ( x ∣ μ ( z ; θ ) , I ) q ( z ; ϕ ) = N ( z ∣ λ , diag ( η 2 ) ) q(\boldsymbol{z}; \boldsymbol{\phi})=\mathcal{N}(\boldsymbol{z}|\boldsymbol{\lambda}, \text{diag}(\boldsymbol{\eta}^2)) q ( z ; ϕ ) = N ( z ∣ λ , diag ( η 2 ))
也即p ( x ∣ z ) p(\boldsymbol{x}|\boldsymbol{z}) p ( x ∣ z ) q ( z ) q(\boldsymbol{z}) q ( z ) ϕ \boldsymbol{\phi} ϕ λ , η \boldsymbol{\lambda}, \boldsymbol{\eta} λ , η
要最大化L ( x ; θ , ϕ ) \mathcal{L}(\boldsymbol{x};\boldsymbol{\theta}, \boldsymbol{\phi}) L ( x ; θ , ϕ )
∂ L ( x ; θ , ϕ ) ∂ θ = 0 , ∂ L ( x ; θ , ϕ ) ∂ ϕ = 0 \frac{\partial \mathcal{L}(\boldsymbol{x};\boldsymbol{\theta}, \boldsymbol{\phi})}{\partial \boldsymbol{\theta}}=0, \frac{\partial \mathcal{L}(\boldsymbol{x};\boldsymbol{\theta}, \boldsymbol{\phi})}{\partial \boldsymbol{\phi}}=0
∂ θ ∂ L ( x ; θ , ϕ ) = 0 , ∂ ϕ ∂ L ( x ; θ , ϕ ) = 0
对于L ( x ; θ , ϕ ) \mathcal{L}(\boldsymbol{x};\boldsymbol{\theta}, \boldsymbol{\phi}) L ( x ; θ , ϕ ) q ( z ; ϕ ) \boldsymbol{q}(z; \boldsymbol{\phi}) q ( z ; ϕ ) p ( z ) p(\boldsymbol{z}) p ( z )
但是对于期望的部分,由于μ ( z ; θ ) \boldsymbol{\mu}(\boldsymbol{z}; \boldsymbol{\theta}) μ ( z ; θ )
2、重参数化技巧
在 MCMC EM 中提到,可以利用采样的方法来近似期望。在 DGM 中,我们同样可以这样做。但是,如果直接对q ( z ; ϕ ) q(\boldsymbol{z}; \boldsymbol{\phi}) q ( z ; ϕ ) λ , η \boldsymbol{\lambda}, \boldsymbol{\eta} λ , η
所以,我们可以利用重参数化技巧 。先从一个标准正态分布N ( 0 , I ) \mathcal{N}(\boldsymbol{0}, \boldsymbol{I}) N ( 0 , I ) ϵ \boldsymbol{\epsilon} ϵ
z = λ + η ⊙ ϵ \boldsymbol{z}=\boldsymbol{\lambda}+\boldsymbol{\eta}\odot\boldsymbol{\epsilon}
z = λ + η ⊙ ϵ
有z ∼ N ( λ , diag ( η 2 ) ) \boldsymbol{z}\sim \mathcal{N}(\boldsymbol{\lambda}, \text{diag}(\boldsymbol{\eta}^2)) z ∼ N ( λ , diag ( η 2 )) z \boldsymbol{z} z q ( z ; ϕ ) q(\boldsymbol{z}; \boldsymbol{\phi}) q ( z ; ϕ ) λ , η \boldsymbol{\lambda}, \boldsymbol{\eta} λ , η
由于p ( x ∣ z ; θ ) p(\boldsymbol{x}|\boldsymbol{z}; \boldsymbol{\theta}) p ( x ∣ z ; θ )
log p ( x ∣ z ; θ ) = C − 1 2 ∥ x − μ ( z ; θ ) ∥ 2 = C − 1 2 ∥ x − μ ( λ + η ⊙ ϵ ; θ ) ∥ 2 \log p(\boldsymbol{x}|\boldsymbol{z}; \boldsymbol{\theta})=C-\frac 1 2 \Vert \boldsymbol{x}-\boldsymbol{\mu}(\boldsymbol{z}; \boldsymbol{\theta})\Vert^2=C-\frac 1 2 \Vert \boldsymbol{x}-\boldsymbol{\mu}(\boldsymbol{\lambda}+\boldsymbol{\eta}\odot\boldsymbol{\epsilon}; \boldsymbol{\theta})\Vert^2
log p ( x ∣ z ; θ ) = C − 2 1 ∥ x − μ ( z ; θ ) ∥ 2 = C − 2 1 ∥ x − μ ( λ + η ⊙ ϵ ; θ ) ∥ 2
于是,期望可以用采样数据来估计:
E q ( z ; ϕ ) [ log p ( x ∣ z ; θ ) ] ≈ 1 S ∑ s = 1 S [ C − 1 2 ∥ x − μ ( λ + η ⊙ ϵ s ; θ ) ∥ 2 ] = L ~ ( x ; θ , ϕ ) \mathbb{E}_{q(\boldsymbol{z}; \boldsymbol{\phi})}[\log p(\boldsymbol{x}|\boldsymbol{z}; \boldsymbol{\theta})]\approx \frac 1 S \sum_{s=1}^S [C-\frac 1 2 \Vert \boldsymbol{x}-\boldsymbol{\mu}(\boldsymbol{\lambda}+\boldsymbol{\eta}\odot\boldsymbol{\epsilon}_s; \boldsymbol{\theta})\Vert^2]=\tilde L(\boldsymbol{x}; \boldsymbol{\theta}, \boldsymbol{\phi})
E q ( z ; ϕ ) [ log p ( x ∣ z ; θ )] ≈ S 1 s = 1 ∑ S [ C − 2 1 ∥ x − μ ( λ + η ⊙ ϵ s ; θ ) ∥ 2 ] = L ~ ( x ; θ , ϕ )
这种形式下,期望对参数θ \boldsymbol{\theta} θ ϕ \boldsymbol{\phi} ϕ
3、在整个数据集上的训练
为了优化最终的目标,对于数据集上的每个数据点x i \boldsymbol{x}_i x i q i ( z ; ϕ i ) q_i(\boldsymbol{z}; \boldsymbol{\phi}_i) q i ( z ; ϕ i ) ϕ i = { λ i , η i } \boldsymbol{\phi}_i=\{\boldsymbol{\lambda}_i, \boldsymbol{\eta}_i\} ϕ i = { λ i , η i }
由于θ \boldsymbol{\theta} θ ϕ \boldsymbol{\phi} ϕ q i ( z ; ϕ i ) q_i(\boldsymbol{z}; \boldsymbol{\phi}_i) q i ( z ; ϕ i ) ϕ i \boldsymbol{\phi}_i ϕ i
我们引入两个深度神经网络g ( ⋅ ; ϕ 1 ) , g ( ⋅ ; ϕ 2 ) g(\cdot;\boldsymbol{\phi}_1), g(\cdot;\boldsymbol{\phi}_2) g ( ⋅ ; ϕ 1 ) , g ( ⋅ ; ϕ 2 ) λ i , η i \boldsymbol{\lambda}_i, \boldsymbol{\eta}_i λ i , η i
λ i = g ( x i ; ϕ 1 ) , η i = g ( x i ; ϕ 2 ) \boldsymbol{\lambda}_i=g(\boldsymbol{x}_i;\boldsymbol{\phi}_1), \boldsymbol{\eta}_i=g(\boldsymbol{x}_i;\boldsymbol{\phi}_2)
λ i = g ( x i ; ϕ 1 ) , η i = g ( x i ; ϕ 2 )
所以只需要同时训练这两个网络就行,这两个网络就能给出所有数据点的λ i , η i \boldsymbol{\lambda}_i, \boldsymbol{\eta}_i λ i , η i
最终,整个 DGM 模型的目标函数如下:
网络g ( ⋅ ; ϕ 1 ) g(\cdot;\boldsymbol{\phi}_1) g ( ⋅ ; ϕ 1 ) 编码器 。由于ϵ \boldsymbol{\epsilon} ϵ g ( ⋅ ; ϕ 2 ) ⊙ ϵ g(\cdot;\boldsymbol{\phi}_2)\odot \boldsymbol{\epsilon} g ( ⋅ ; ϕ 2 ) ⊙ ϵ 高斯噪声 。
由z \boldsymbol{z} z x \boldsymbol{x} x μ ( z ; θ ) \boldsymbol{\mu}(\boldsymbol{z}; \boldsymbol{\theta}) μ ( z ; θ ) 解码器 。我们还加入了一个 KL 散度作为正则项。
以上,其实就是所谓的变分自编码器(VAE) :
相比普通的自编码器(AE),VAE 引入了一个正则项 KL 散度,同时还引入了高斯噪声。
第十五讲 表示学习
Representation Learning
1、引入
表示学习的目标是将数据点x i x_i x i R d \mathbb{R}^d R d 语义信息 (Semantic Information)。这里的x i x_i x i
例如,数据为手写数字的图片。我们希望映射后,相同数字的图片在空间中尽可能相近。
这样重新表示后,数据更为紧凑 (Compact),而且仅保留了重要的语义信息,便于后续的处理,也很容易使用一些下游的方法来处理:例如分类、聚类等。
2、图片表示
对于有监督的情况,之前介绍过用 CNN 来训练一个分类器:
卷积-池化层的部分可以看成在做特征提取,全连接层的部分可以看成在做分类。则最后一个卷积-池化层的输出就可以看作是对原始图片的一个重新表示。有时,全连接层的输出也可以看作是一个表示。
对于无监督的情况,可以先用一个带标签的辅助数据集训练一个 CNN,这个预训练的 CNN 同样可以看为是特征提取。
再在无标签的数据集上,用这个预训练的 CNN,就得到了一个新的表示。
上一讲介绍到的变分自编码器,其中的编码器就相当于做特征提取,编码后的结果也可以看做是一个表示。PCA 可以看做是一个线性的自编码器。
2.1、SimCLR
Simple Framework for Contrastive Learning,是一种对比学习 (Contrastive Learning)框架,
对于一张图片,我们可以对其做一些变换,例如裁剪、旋转、翻转等,这个过程也称为数据增广 (Data Augmentation):
x i + = aug ( x i ) \boldsymbol{x}_i^+=\text{aug}(\boldsymbol{x}_i)
x i + = aug ( x i )
SimCLR 的基本思想就是让x i \boldsymbol{x}_i x i x i + \boldsymbol{x}_i^+ x i + x j \boldsymbol{x}_j x j x j + \boldsymbol{x}_j^+ x j +
图中h i , h j \boldsymbol{h}_i, \boldsymbol{h}_j h i , h j x ~ i , x ~ j \tilde{\boldsymbol{x}}_i, \tilde{\boldsymbol{x}}_j x ~ i , x ~ j g ( ⋅ ) g(\cdot) g ( ⋅ )
某个数据点上的损失函数(称之为InfoNCE Loss )可以写为:
L = − log exp ( sim ( z i , z i + ) / τ ) ∑ j ≠ i exp ( sim ( z i , z j ) / τ ) + ∑ j ≠ i exp ( sim ( z i , z j + ) / τ ) + exp ( sim ( z i , z j + ) / τ ) L=-\log \frac{\exp(\text{sim}(\boldsymbol{z}_i, \boldsymbol{z}_i^+)/\tau)}{\sum_{j\neq i}\exp(\text{sim}(\boldsymbol{z}_i, \boldsymbol{z}_j)/\tau)+\sum_{j\neq i}\exp(\text{sim}(\boldsymbol{z}_i, \boldsymbol{z}_j^+)/\tau)+\exp(\text{sim}(\boldsymbol{z}_i, \boldsymbol{z} _j^+)/\tau)}
L = − log ∑ j = i exp ( sim ( z i , z j ) / τ ) + ∑ j = i exp ( sim ( z i , z j + ) / τ ) + exp ( sim ( z i , z j + ) / τ ) exp ( sim ( z i , z i + ) / τ )
其中sim ( z i , z j ) = z i T z j / ∥ z i ∥ ∥ z j ∥ \text{sim}(\boldsymbol{z}_i, \boldsymbol{z}_j)=\boldsymbol{z}_i^T\boldsymbol{z}_j/\Vert \boldsymbol{z}_i\Vert \Vert \boldsymbol{z}_j\Vert sim ( z i , z j ) = z i T z j /∥ z i ∥∥ z j ∥
由这个函数可以看出,最小化这个损失,就是在尽可能将z i \boldsymbol{z}_i z i z i + \boldsymbol{z}_i^+ z i + z i \boldsymbol{z}_i z i
首先利用 SimCLR 在某个无标签的大数据集上训练一个特征提取器f ( ⋅ ) f(\cdot) f ( ⋅ ) g ( ⋅ ) g(\cdot) g ( ⋅ )
其中前半部分可以看作是在训练一个一般的特征提取器,后半部分可以看作针对任务进行的微调。
后半部分训练的投影头可以显著提升整个模型的性能:
同时使用大批量的数据进行训练也可以显著提升 SimCLR 的性能,但是也会对硬件有更高的要求:
对于两个服从联合分布p ( x , y ) p(x, y) p ( x , y ) X , Y X, Y X , Y 互信息 (Mutual Information)定义为:
I ( X , Y ) = ∫ p ( x , y ) log p ( x , y ) p ( x ) p ( y ) d x d y I(X, Y)=\int p(x, y)\log \frac{p(x, y)}{p(x)p(y)}dxdy
I ( X , Y ) = ∫ p ( x , y ) log p ( x ) p ( y ) p ( x , y ) d x d y
可以从不同的角度理解:
I ( x , y ) = KL ( p ( x , y ) ∥ p ( x ) p ( y ) ) I(x, y)=\text{KL}(p(x, y)\Vert p(x)p(y)) I ( x , y ) = KL ( p ( x , y ) ∥ p ( x ) p ( y )) I ( x , y ) = H ( x ) − H ( x ∣ y ) = H ( y ) − H ( y ∣ x ) I(x, y)=H(x)-H(x|y)=H(y)-H(y|x) I ( x , y ) = H ( x ) − H ( x ∣ y ) = H ( y ) − H ( y ∣ x )
直观来说,互信息可以理解为两者之间的相关性,共享的信息量。
可以证明,互信息的一个下界是:
I ( X , Y ) ⩾ log K + E p ( x , y ) ∏ k = 1 K p ( y k ) log e s ( x , y ) e s ( x , y ) + ∑ k = 1 K − 1 e s ( x , y k ) I(X, Y)\geqslant \log K+\mathbb{E}_{p(x, y)}\prod_{k=1}^K p(y_k)\log{\frac{e^{s(x, y)}}{e^{s(x, y)}+\sum_{k=1}^{K-1} e^{s(x, y_k)}}}
I ( X , Y ) ⩾ log K + E p ( x , y ) k = 1 ∏ K p ( y k ) log e s ( x , y ) + ∑ k = 1 K − 1 e s ( x , y k ) e s ( x , y )
其中p ( y ) = ∫ p ( x , y ) d x p(y)=\int p(x, y)dx p ( y ) = ∫ p ( x , y ) d x s ( x , y ) s(x, y) s ( x , y )
期望可以通过采样的方式估计。从联合分布中抽取一个样本( x , y ) (x, y) ( x , y ) K − 1 K-1 K − 1 y k y_k y k
I ( X , Y ) ⩾ L ≈ log K + log e s ( x , y ) e s ( x , y ) + ∑ k = 1 K − 1 e s ( x , y k ) I(X, Y)\geqslant L\approx \log K+\log \frac{e^{s(x, y)}}{e^{s(x, y)}+\sum_{k=1}^{K-1} e^{s(x, y_k)}}
I ( X , Y ) ⩾ L ≈ log K + log e s ( x , y ) + ∑ k = 1 K − 1 e s ( x , y k ) e s ( x , y )
结合 SimCLR,两个随机变量Z = g ( f ( T ( x ) ) , Z + = g ( f ( T ( x ) ) ) Z=g(f(\mathcal{T}(\boldsymbol{x})), Z^+=g(f(\mathcal{T}(\boldsymbol{x}))) Z = g ( f ( T ( x )) , Z + = g ( f ( T ( x ))) T ( ⋅ ) \mathcal{T}(\cdot) T ( ⋅ )
所以可以写出这两个随机变量的互信息下界估计:
I ( Z , Z + ) ⩾ log N + log e s ( z , z + ) e s ( z , z + ) + ∑ k = 1 N − 1 e s ( z , z k + ) I(Z, Z^+)\geqslant \log N+\log \frac{e^{s(z, z^+)}}{e^{s(z, z^+)}+\sum_{k=1}^{N-1} e^{s(z, z_k^+)}}
I ( Z , Z + ) ⩾ log N + log e s ( z , z + ) + ∑ k = 1 N − 1 e s ( z , z k + ) e s ( z , z + )
由于分布p ( z ) p(z) p ( z ) p ( z + ) p(z^+) p ( z + ) ( z i , z i + ) (z_i, z_i^+) ( z i , z i + ) p ( z , z + ) p(z, z^+) p ( z , z + ) ( z i , z j + ) (z_i, z_j^+) ( z i , z j + ) p ( z + ) p(z^+) p ( z + )
于是,这个下界的估计可以重新写为:
I ( Z , Z + ) ⩾ log ( 2 N − 1 ) + log e s ( z i , z i + ) e s ( z , z + ) + ∑ j ≠ i e s ( z , z j ) + ∑ j ≠ i e s ( z , z j + ) I(Z, Z^+)\geqslant \log (2N-1)+\log \frac{e^{s(z_i, z_i^+)}}{e^{s(z, z^+)}+\sum_{j\neq i} e^{s(z, z_j)}+\sum_{j\neq i} e^{s(z, z_j^+)}}
I ( Z , Z + ) ⩾ log ( 2 N − 1 ) + log e s ( z , z + ) + ∑ j = i e s ( z , z j ) + ∑ j = i e s ( z , z j + ) e s ( z i , z i + )
可以发现后半部分就是 InfoNCE 的负值。所以 SimCLR 目标是最小化 InfoNCE,可以理解为最大化互信息的下界,也即最大化互信息。直观上来讲,尽可能找到数据之间的关联。
2.2、MoCo
名字来源于 Momentum Contrast,是另一种对比学习框架。
首先引入一些概念。在 SimCLR 中,对原始数据x \boldsymbol{x} x x + \boldsymbol{x}^+ x + 锚点/基准点 (Anchor)和正样本 。相应的,其他的数据和它们的增广称为负样本 。SimCLR 就是在训练一个编码器,使得由锚点和正样本编码出来的特征在表示空间中尽可能接近,而与负样本尽可能远。
对比学习可以看成是一个字典查询任务。构建一个字典,字典的键就是各个样本,值就是编码后的特征(表示)。我们称锚点的编码为 query(或者简记为 q,对应的原始数据为x q \boldsymbol{x}^q x q x k \boldsymbol{x}^k x k 注意,这里的 key 并不是(字典的)键的意思,只是一个称呼,其实际对应是字典的值。
SimCLR 中,实际是对锚点x q \boldsymbol{x}^q x q x k \boldsymbol{x}^k x k 相同的编码器 得到 q 和 k,然后计算相似度,使得 q 和正样本的 k 的相似度尽可能大,而 q 和负样本的 k 相似度尽可能小,以此更新编码器参数。SimCLR 中,每个批次数据以及编码出的特征构成字典。所以字典大小与批次大小相关联,容易受到硬件瓶颈限制。
后来引入了 Memory Bank 的概念,所有样本的编码特征都存储在 Memory Bank 中。每次训练,正常获得 q,然后从 Memory Bank 中随机抽取部分 k 以及对应的x k \boldsymbol{x}^k x k x k \boldsymbol{x}^k x k
但是这种方法下,由于每次只更新 Memory Bank 的部分编码,所以会导致 Memory Bank 中的编码特征的一致性很差(不是同一个编码器编码的),最终导致 q 和 k 的相似度计算不准确。
MoCo 在 Memory Bank 的基础上进一步改进,它给 Memory Bank 引入了一个更新缓慢的动量编码器。动量编码器的参数更新不如主编码器那么频繁,所以 Memory Bank 中的编码特征相对比较一致。
另外,Memory Bank 换用队列结构。队列中的每个元素都是一个字典。对一个批次训练,使用队头的字典。主编码器、动量编码器的参数更新后,对使用到的字典用动量编码器进行更新,然后将这个字典放入队列的尾部,同时将队列头部的字典移除。
通过以上改进,不仅实现了字典大小与批次大小的解耦,还解决了 Memory Bank 中编码特征的一致性问题。
MoCo v2 结合了 SimCLR 中非线性投影头,以及 MoCo 中的 Memory Bank 和动量编码器,进一步提升了性能。
3、文本表示
3.1、独热编码、BOW 和 TFIDF
最简单的表示文本数据的方法,是将词表中的每一个词都用一个独热向量来表示。但显然,当句子非常长时,这种方法就非常的笨重。
另一种表示方法——词袋模型 (Bag of Words,BOW ),丢弃了句子内词的顺序信息,只考虑文本中每个词的数量,也即每个词被认为有同等的重要性。但是,不同的词所含的信息量是不同的(例如介词和名词,两者所含的信息相差甚远),所以这种方法也有局限性。
TFIDF ,Term Frequency-Inverse Document Frequency,这种方法认为每个词有不同的重要性。
一个词的 TFIDF 计算公式为:
TFIDF ( w , d , D ) = TF ( w , d ) ⋅ IDF ( w , D ) \text{TFIDF}(w, d, \mathcal{D})=\text{TF}(w, d)\cdot \text{IDF}(w, \mathcal{D})
TFIDF ( w , d , D ) = TF ( w , d ) ⋅ IDF ( w , D )
其中w w w d d d d d d D \mathcal{D} D
TF ( w , d ) \text{TF}(w, d) TF ( w , d ) d d d w w w TF ( w , d ) = n w / n \text{TF}{(w, d)}=n_w/n TF ( w , d ) = n w / n
IDF ( w , D ) \text{IDF}(w, \mathcal{D}) IDF ( w , D ) w w w IDF ( w , D ) = log ( N / N contain w ) \text{IDF}(w, \mathcal{D})=\log (N/N_{\text{contain w}}) IDF ( w , D ) = log ( N / N contain w ) w w w w w w
以上三种方法均不能反映“近义词关系”,或者说语义相似性 (Semantic Similarities),例如“soccer”和“football”在表示空间中可能很不一样。
而且用这三种方法进行表示,维度都比较高(尤其是独热编码),而且比较稀疏。BOW 和 TDIDF 还不包含词的顺序信息,而众所周知,同一个词在不同上下文的含义可能是完全相反的。
3.2、Word2Vex
基于上面三种方法的局限,我们希望设计出这样的一种文本表示方法:
表示是比较紧的(表示空间尽可能低维)
能够反映近义词(词之间的语义相似性)
一个朴素的观察是,如果两个词经常在句子中同时出现(或相互替换),就说明它们有某种程度的语义相似性,也就是说词的语义相似性隐含在句子中。我们可以通过学习大量的句子,来捕捉到这种相似性。
有两种基本的方法,Skip-grams 和 CBOW (Continuous Bag-of-Words)。前者是根据一个中心词来预测出前后的词,然后与原文比较,进行训练;后者是根据前后词预测出中心词,然后与原文比较,进行训练。
首先介绍 Skip-grams。一开始,每一个词都用一个随机的实值向量来表示w ∈ R m \boldsymbol{w}\in\mathbb{R}^m w ∈ R m 嵌入 (Embedding)。
句子w 1 w 1 w 2 ⋯ w T \boldsymbol{w}_1\boldsymbol{w}_1\boldsymbol{w}_2\cdots \boldsymbol{w}_T w 1 w 1 w 2 ⋯ w T w t \boldsymbol{w}_t w t
J ( θ ) = − 1 T ∑ t = 1 T ∑ ∣ j ∣ ⩽ m , j ≠ 0 log P ( w t + j ∣ w t ; θ ) J(\boldsymbol{\theta})=-\frac 1 T \sum_{t=1}^T \sum_{|j|\leqslant m,j\neq 0} \log P(\boldsymbol{w}_{t+j}|\boldsymbol{w}_t;\boldsymbol{\theta})
J ( θ ) = − T 1 t = 1 ∑ T ∣ j ∣ ⩽ m , j = 0 ∑ log P ( w t + j ∣ w t ; θ )
其中预测词出现的概率P ( w t + j ∣ w t ; θ ) P(\boldsymbol{w}_{t+j}|\boldsymbol{w}_t;\boldsymbol{\theta}) P ( w t + j ∣ w t ; θ )
P ( w t + j ∣ w t ; θ ) = exp ( w t T w t + j ) ∑ w ∈ W exp ( w t T w ) P(\boldsymbol{w}_{t+j}|\boldsymbol{w}_t;\boldsymbol{\theta})=\frac{\exp(\boldsymbol{w}_t^T \boldsymbol{w}_{t+j})}{\sum_{\boldsymbol{w}\in \mathcal{W}}\exp(\boldsymbol{w}_t^T \boldsymbol{w} )}
P ( w t + j ∣ w t ; θ ) = ∑ w ∈ W exp ( w t T w ) exp ( w t T w t + j )
其中W \mathcal{W} W
用大量语料训练后,具有语义相似性越大的两个词的嵌入(两个向量),其sim ( w i , w j ) = cos θ \text{sim}(\boldsymbol{w}_i, \boldsymbol{w}_j)=\cos \theta sim ( w i , w j ) = cos θ
CBOW 则反之,是类似的,这里不再赘述。
句子的嵌入可以通过句子中的词嵌入的平均得到R m \mathbb{R}^m R m R T × m \mathbb{R}^{T\times m} R T × m
3.3、ELMo
Word2Vex 一个缺点是,每个词都只有一个固定的嵌入。但是一个词可能有很多意思,不同的语义下应该用不同的嵌入方式。
因此,考虑根据输入的句子作为上下文,来具体计算每个词的表征,提出了 ELMo(Embeddings from Language Model)。其基本思想,是用训练语言模型的套路,把语言模型中间隐含层的输出提取出来,作为这个词在当前上下文情境下的表征。(这与我们在图像表示中,用 CNN 最后一个卷积层作为表示的思路类似)
具体而言,其流程如下:
在大语料库上训练一个双向 RNN
将感兴趣的句子正向/反向输入这个预训练的 RNN
最后的词的嵌入由两种情况下 RNN 的隐藏层拼接起来构成
3.4、BERT
ELMo 嵌入也有一些缺陷:
RNN 记忆能力有限,难以捕获长距离依赖
RNN 只允许顺序执行操作,难以并行化
BERT(Bidirectional Encoder Representations from Transformers),其与 RNN 不同,采用的是基于 Transformer 的“全连接”结构。相比于传统的全连接层,Transformer 是一种依赖于自注意力机制的架构,能够有效处理序列数据。
BERT 模型的预训练任务可以分为两个部分:
Masked Language Model(MLM):在输入的句子中随机 Mask (掩盖、隐藏)掉一些词,然后训练模型去预测这些 mask 掉的词
Next Sentence Prediction(NSP):在输入的句子对中,训练模型去预测第二个句子是否是第一个句子的下一个句子
每次输入两个句子,用特殊的符号区分这两个句子,然后将两个句子拼接起来输入模型,同时进行 MLM 和 NSP 任务:
BERT 模型最终得到的嵌入由三个部分的和构成:
Token Embeddings:输入的词的嵌入。
Segment Embeddings:区分输入中的不同句子。例如,第一个句子的嵌入为 0,第二个句子的嵌入为 1。
Position Embeddings:位置嵌入,用于区分不同位置的词。其公式为:PE ( p o s , i ) = sin ( p o s / 10000 2 i / d ) \text{PE}_{(pos, i)}=\sin(pos/10000^{2i/d}) PE ( p os , i ) = sin ( p os /1000 0 2 i / d )
第十六讲 推荐系统
1、引入
对推荐问题进行建模,记X X X S S S R R R 效用矩阵 (Utility Matrix),R i j R_{ij} R ij i i i j j j u : X × S → R u:X\times S\rightarrow \mathbb{R} u : X × S → R
在推荐问题中,有以下几个关键问题:
收集可以获得的数据,填充效用矩阵
外推无法观测/未知的数据,尤其是关注高的效用值
评估外推方法的好坏
对于第一个问题,可以去直接询问(Explit Feedback)用户对物品的评分,也可以通过用户的行为(Implicit Feedback)来推断用户对物品的喜好。例如用户下单购买某商品,相比只是浏览,反映着较高的喜爱程度。
关于外推其他效用值。首先,由于用户不可能购买过所有商品,所以效用矩阵是稀疏的。也就是说,用户购买商品的记录十分有限,要面临冷启动问题。其次,对于新用户或者是新商品,根本没有任何历史记录,很难做外推。
2、基于内容的推荐
Content-Based Recommendation,这是一种不依赖于效用矩阵的推荐方法。其基本思想是根据该用户打出高分的物品,推荐与之相似的物品,例如推荐相同类型/演员/风格的电影。
为了判断两个物品的相似性,首先我们要为物品创建一个档案(Profile),也即代表物品的特征向量。对于电影来说,档案可以代表导演/标题/演员等;对于文本来说,可以是关键词等。我们需要挑选出最能代表物品的特征,例如对于文本,可以用我们之前提到的 TFIDF 方法。
然后两个物品之间的相似度,可以用档案的余弦相似度来衡量,也即两个向量夹角的余弦。
优点:
无需其他用户的数据,没有稀疏以及冷启动的问题。
每个用户有一个独立的推荐状态,不易受到其他用户的影响。
有可解释性
缺点:
找到合适的特征比较困难
新用户无历史记录,难以推荐
过度专一化,无法跟上用户的新兴趣,也无法利用其它用户的评价来辅助判断。
3、协同过滤
Collaborative Filtering
3.1、用户-用户协同过滤
其灵感是,如果有一批人 N N N x x x N N N x x x
记x x x r x \boldsymbol{r}_x r x I x , y I_{x, y} I x , y x x x y y y 皮尔逊相关系数 (Pearson correlation coefficient):
sim ( x , y ) = ∑ i ∈ I x y ( r x i − r ˉ x ) ( r y i − r ˉ y ) ∑ i ∈ I x y ( r x i − r ˉ x ) 2 ∑ i ∈ I x y ( r y i − r ˉ y ) 2 \text{sim}(x, y)=\frac{\sum_{i\in I_{xy}}(r_{xi}-\bar{r}_x)(r_{yi}-\bar{r}_y)}{\sqrt{\sum_{i\in I_{xy}}(r_{xi}-\bar{r}_x)^2}\sqrt{\sum_{i\in I_{xy}}(r_{yi}-\bar{r}_y)^2}}
sim ( x , y ) = ∑ i ∈ I x y ( r x i − r ˉ x ) 2 ∑ i ∈ I x y ( r y i − r ˉ y ) 2 ∑ i ∈ I x y ( r x i − r ˉ x ) ( r y i − r ˉ y )
这里减去平均值是为了避免将没评分的结果(0)视为最负面的结果,所以减去平均值后,正面的评分为正,负面的评分为负,更能够反映用户的喜好。
于是可以这样做外推:
r ^ x i = r ˉ x + ∑ y ∈ N sim ( x , y ) ( r y i − r ˉ y ) ∑ y ∈ N sim ( x , y ) \hat{r}_{x i}=\bar{r}_x+\frac{\sum_{y\in N} \text{sim}(x, y)(r_{yi}-\bar{r}_y)}{\sum_{y\in N} \text{sim}(x, y)}
r ^ x i = r ˉ x + ∑ y ∈ N sim ( x , y ) ∑ y ∈ N sim ( x , y ) ( r y i − r ˉ y )
3.2、物品-物品协同过滤
这种方法的灵感来源于,如果用户 x x x
其与上面那种方法是类似的,只是这里是计算物品之间的相似度,而不是用户之间的相似度:
r x i = b x i + ∑ j ∈ I x sim ( i , j ) ( r x j − b x j ) ∑ j ∈ I x sim ( i , j ) r_{x i}=b_{x i}+\frac{\sum_{j\in I_{x}}\text{sim}(i, j)(r_{xj}-b_{xj})}{\sum_{j\in I_{x}}\text{sim}(i, j)}
r x i = b x i + ∑ j ∈ I x sim ( i , j ) ∑ j ∈ I x sim ( i , j ) ( r x j − b x j )
这里I x I_x I x x x x b x i = μ + b x + b i b_{x i}=\mu+b_x+b_i b x i = μ + b x + b i μ \mu μ b x b_x b x x x x b i b_i b i i i i i i i
实际中,物品-物品联合推荐表现要比用户-用户联合推荐好,因为物品的特征和相似性更容易捕获,且相对单一。而用户的品味和爱好是多样的。
3.3、分析
协同过滤的优点:对于各种物品都适用,无需去挑选特征。
缺点:冷启动问题,对于新用户和新物品(First rater),无法推荐。且对于稀疏数据,效果不佳。而且倾向于推荐热门物品,缺乏多样性。
实践中,一般都结合使用上述方法。
4、基于矩阵分解的推荐
考虑效用矩阵U ∈ R m × n \boldsymbol{U}\in \mathbb{R}^{m\times n} U ∈ R m × n m m m n n n P T ∈ R m × k \boldsymbol{P}^T\in \mathbb{R}^{m\times k} P T ∈ R m × k Q ∈ R n × k \boldsymbol{Q}\in \mathbb{R}^{n\times k} Q ∈ R n × k U ≈ P T Q \boldsymbol{U}\approx \boldsymbol{P}^T\boldsymbol{Q} U ≈ P T Q
我们希望近似的结果尽可能接近,并加上一些正则项,所以可以目标是最小化:
min P , Q ∑ i , j ( r i j − p i T q j ) 2 + λ ( ∥ p i ∥ 2 + ∥ q j ∥ 2 ) \min_{\boldsymbol{P}, \boldsymbol{Q}}\sum_{i, j}(r_{ij}-\boldsymbol{p}_i^T\boldsymbol{q}_j)^2+\lambda(\Vert \boldsymbol{p}_i\Vert^2+\Vert \boldsymbol{q}_j\Vert^2)
P , Q min i , j ∑ ( r ij − p i T q j ) 2 + λ ( ∥ p i ∥ 2 + ∥ q j ∥ 2 )
仅考虑有评分的项,通过梯度下降来进行训练。最终可以利用p T q \boldsymbol{p}^T\boldsymbol{q} p T q
第十七讲 异常检测
Anomaly Detection ,有时也称为离群点检测 或新颖性检测。
1、引入
一般来说,在一个数据集中,绝大部分的样本都是“相同的”,我们称这些样本为正常样本 。剩下的样本与正常样本们往往有很大的不同,我们称这些样本为异常样本 。
异常样本与正常样本之间差异也是多种多样的,仅通过一个两个显式的标准很难判断某个样本是否异常,这也是异常检测的难点。
网络入侵检测、信用卡欺诈检测、罕见疾病诊断、工业损伤检测等问题,都可以看作是异常检测问题。原来解决这些问题的方法,往往都是依靠已有的或者已出现的异常:如果新的样本和以前出现过的异常样本相似,那么就可以判断这个样本也是异常的。这种方法一个最大的问题是,对于一种全新的异常,是检测不出来的。这也是以前的异常检测方法的一个最大的缺陷。
异常的种类包括:
点异常 :只通过样本本身就能判断的异常(相对接下来的上下文异常或者整体异常而言)上下文异常 :样本本身看起来正常,只有放到一个上下文中才能看出的异常。比如一个波正常应该是波峰的区域,出现了波谷:整体异常 :单独看或者在上下文中看都是正常的,但是整体来看是异常的。比如心电图中的某一段变为直线,这段直线在周围正常的波形中就显得异常:
2、基于距离的异常检测
异常点也被称为离群点,也就是距离“大部队”比较“远”的点。基于距离的异常检测方法,就是通过计算样本点与其他样本点的距离,更具体的说,是离第k k k
优点:
缺点:
需要知道样本点两两之间的距离,复杂度高达O ( n 2 ) O(n^2) O ( n 2 )
对k k k
对于高维数据,难以找到一种合适的距离度量
3、基于密度的异常检测
另一角度看,离群点旁边的点总是比较少,或者说异常点总是落在低密度的区域。
基于密度的异常检测,首先根据大量的正常样本,估计出一个概率密度分布p ^ ( x ) \hat{p}(x) p ^ ( x ) x x x p ( x ) p(x) p ( x ) p ( x ) p(x) p ( x )
核密度估计 (Kernel Density Estimation)是一种常用的密度估计方法。这种方法中,一组样本x i \boldsymbol{x}_i x i
p ^ ( x ) = 1 N h ∑ i = 1 n K ( x − x i h ) \hat{p}(\boldsymbol{x})=\frac {1}{Nh} \sum_{i=1}^n K(\frac{\boldsymbol{x}-\boldsymbol{x}_i}{h})
p ^ ( x ) = N h 1 i = 1 ∑ n K ( h x − x i )
其中K ( ⋅ ) K(\cdot) K ( ⋅ ) h h h
KDE 的缺点是,对h h h
另一种方法是,用已知的分布去拟合数据,类似于之前的高斯混合模型。概率密度分布可写为:
p ^ ( x ) = N ( x ∣ μ , Σ ) \hat{p}(\boldsymbol{x})=\mathcal{N}(\boldsymbol{x}|\boldsymbol{\mu}, \boldsymbol{\Sigma})
p ^ ( x ) = N ( x ∣ μ , Σ )
或者是:
p ^ ( x ) = ∑ i = 1 k π i N ( x ∣ μ i , Σ i ) \hat{p}(\boldsymbol{x})=\sum_{i=1}^k \pi_i \mathcal{N}(\boldsymbol{x}|\boldsymbol{\mu}_i, \boldsymbol{\Sigma}_i)
p ^ ( x ) = i = 1 ∑ k π i N ( x ∣ μ i , Σ i )
其中参数θ \boldsymbol{\theta} θ
这种方法好坏受到选择分布本身的表达能力的限制,且同样在高维数据上表现不佳。
针对在高维数据上表现不佳的问题,提出了两阶段法 :
通过某种方式(PCA、自编码器等)对数据进行降维/学习到一个低维的表示
利用 KDE 或者已知分布拟合,对降维后的数据进行密度估计
用大量正常样本训练深度生成模型(如 VAE、GAN)等,也可以得到一个概率密度分布。然后用这个分布来判断新样本是否异常。
4、基于重建的异常检测
在大量正常样本上训练一个编码——解码模型。编码器将输入的样本映射到一个低维的表示,训练解码器能够将这个低维表示重建回原始的样本。
由于是在正常样本上训练的,所以对于正常样本,重建出来的样本应该和原始样本相似;而对于异常样本,重建出来的样本应该和原始样本有较大的差异。依据这个原理,我们可以用重建误差来判断样本是否异常。
其实,这种方法的本质,也是在寻找正常样本的某种特征或者说低维表示(训练编码器),只是利用特征/低维表示的方式有所不同。
5、单类分类器
由于大量的数据都比较“靠近”,可以想象画一个圈,将大部分的数据包含在里面,圈外的数据就是异常的。也就是说,只划分一个类出来,所以这种方法叫做单类分类器。
首先考虑找到一个最小的超球,能将所有的样本点包含进去。设超球的半径为r r r c \boldsymbol{c} c
min c , r r 2 , s.t. ∥ ϕ ( x i ) − c ∥ 2 ⩽ r 2 \min_{\boldsymbol{c}, r} r^2, \text{ s.t. } \Vert \phi(\boldsymbol{x}_i)-\boldsymbol{c}\Vert^2\leqslant r^2
c , r min r 2 , s.t. ∥ ϕ ( x i ) − c ∥ 2 ⩽ r 2
其中ϕ ( ⋅ ) \phi(\cdot) ϕ ( ⋅ )
显然,这样的超球很容易受到离群点的影响。为了将离群点包含进去,不得不增大超球的半径。
接下来,考虑松弛,将这些离群点“放出去”。引入一个松弛变量ξ i \xi_i ξ i
min c , r , ξ r 2 + 1 ν n ∑ i = 1 n ξ i , s.t. ∥ ϕ ( x i ) − c ∥ 2 ⩽ r 2 + ξ i , ξ i ⩾ 0 \min_{\boldsymbol{c}, r, \boldsymbol{\xi}} r^2+\frac{1}{\nu n}\sum_{i=1}^n \xi_i, \text{ s.t. } \Vert \phi(\boldsymbol{x}_i)-\boldsymbol{c}\Vert^2\leqslant r^2+\xi_i, \xi_i\geqslant 0
c , r , ξ min r 2 + ν n 1 i = 1 ∑ n ξ i , s.t. ∥ ϕ ( x i ) − c ∥ 2 ⩽ r 2 + ξ i , ξ i ⩾ 0
其中ν \nu ν ν \nu ν
通过这样的超球,就可以按照一开始的想法,将超球内的样本划分为正常样本,超球外的样本划分为异常样本。
ϕ ( ⋅ ) \phi(\cdot) ϕ ( ⋅ )
ϕ ( ⋅ ) \phi(\cdot) ϕ ( ⋅ )
L = r 2 + 1 ν n ∑ i = 1 n max ( 0 , ∥ ϕ ( x i ) − c ∥ 2 − r 2 ) L=r^2+\frac{1}{\nu n}\sum_{i=1}^n \max(0, \Vert \phi(\boldsymbol{x}_i)-\boldsymbol{c}\Vert^2-r^2)
L = r 2 + ν n 1 i = 1 ∑ n max ( 0 , ∥ ϕ ( x i ) − c ∥ 2 − r 2 )
6、评估指标
如何评估异常检测的好坏?
根据样本实际的正常与否以及预测结果,可以得出下面这个表格:
四类样本的数量,用其名字的首字母表示,例如 TP 代表 True Positive。
一种直接的想法是用预测的准确率 来评估:
AC = T P + T N T P + T N + F P + F N \text{AC}=\frac{TP+TN}{TP+TN+FP+FN}
AC = TP + TN + FP + FN TP + TN
但是,这种指标对于异常检测来说并不合适,因为异常样本往往是少数,而正常样本是多数。粗暴地全部认为是正确样本,就能得到一个很高的准确率。
6.1、ROC 曲线
考虑将正常样本预测为正常的比例(True Positive Rate,也称为召回率 )TPR = T P / ( T P + F N ) \text{TPR}=TP/(TP+FN) TPR = TP / ( TP + FN ) FPR = F P / ( F P + T N ) \text{FPR}=FP/(FP+TN) FPR = FP / ( FP + TN ) ROC 曲线 (Receiver Operating Characteristic Curve):
可以想象,某个分类阈值对应的点越靠近左上角,说明其能在正确识别出绝大部分正常样本的同时,只将很少的异常样本误判为正常样本,也就说明这个分类阈值更好。
而对于整个异常检测方法而言,可以用 ROC 曲线下的面积(Area Under ROC Curve,AUROC )来评估。AUROC 越大,说明曲线越靠近左上角,也就说明每个分类阈值下表现都很好,也就说明这个异常检测方法越好。
随机预测的情况下,TPR 始终为 0.5,对应 AUROC 为 0.5。所以可以 0.5 作为基准,来评估异常检测方法的好坏。
6.2、PR 曲线
考虑召回率Recall = T P / ( T P + F N ) \text{Recall}=TP/(TP+FN) Recall = TP / ( TP + FN ) Precision = T P / ( T P + F P ) \text{Precision}=TP/(TP+FP) Precision = TP / ( TP + FP ) PR 曲线 (Precision-Recall Curve):
某个分类阈值对应的点越靠近右上角,说明不但能够召回大部分正常样本(横坐标大,召回率高),还能较好的剔除异常样本(纵坐标大,精确率高),也就说明这个分类阈值更好。
对于整个异常检测方法而言,可以用 PR 曲线下的面积(Area Under PR Curve,AUPR)来评估。AUPR 越大,说明曲线越靠近右上角,也就说明每个分类阈值下表现都很好,也就说明这个异常检测方法越好。
随机检测的 AUPR 不一定为 0.5,可以直接将用了异常检测方法的 AUPR 与随机检测的 AUPR 进行比较,如果更大,说明这个异常检测方法是有效的。
6.3、F1 值
这是一个形式和使用更加简单的指标。F1 值是精确率和召回率的调和平均:
F 1 = 2 Precision − 1 + Recall − 1 = 2 ⋅ Precision × Recall Precision + Recall F1=\frac{2}{\text{Precision}^{-1}+\text{Recall}^{-1}}=2\cdot \frac{\text{Precision}\times \text{Recall}}{\text{Precision}+\text{Recall}}
F 1 = Precision − 1 + Recall − 1 2 = 2 ⋅ Precision + Recall Precision × Recall
F1 值越大,说明精确率和召回率都很高,也就说明这个异常检测方法越好。